
INDICE
- 0.1 BASE DI UNO SPAZIO VETTORIALE – DEFINIZIONE
- 0.2 ALCUNI SEMPLICI ESEMPI DI BASE DI UNO SPAZIO VETTORIALE
- 0.3 ESEMPIO 1 – BASE CON UN VETTORE IN R2
- 0.4 ESEMPIO 2 – BASE CON DUE VETTORI IN R2
- 0.5 ESEMPIO 3 – BASE CON UN VETTORE IN R3
- 0.6 ESEMPIO 4 – BASE CON DUE VETTORI IN R3
- 0.7 ESEMPIO 4 – BASE CON TRE VETTORI IN R3
- 0.8 BASI CANONICHE DI UNO SPAZIO VETTORIALE
- 0.9 BASI DI UNO SPAZIO E MATRICI ASSOCIATE
- 0.10 BASE NON CANONICA DI UNO SPAZIO VETTORIALE
- 0.11 ESEMPI DI NON BASE
- 0.12 NON BASI DI R2
- 0.13 DIFFERENZA TRA BASE E GENERATORI
- 0.14 BASI ORTOGONALI E ORTONORMALI
- 0.15 LA BASE CANONICA È SIA ORTOGONALE CHE ORTONORMALE
- 0.16 ALTRI ESEMPI DI BASI ORTOGONALI E ORTONORMALI
- 0.17 COSTRUIRE UNA BASE ORTOGONALE – GRAM-SCHMIDT
- 0.18 BASE DI UN SOTTOSPAZIO VETTORIALE
- 0.19 CAMBIAMENTO DI BASE
- 0.20 UNA PROCEDURA PIÙ GENERALE PER IL CAMBIO DI BASE
- 0.21 ESEMPIO
- 0.22 BASI DI POLINOMI E MATRICI
- 0.23 BASI DI POLINOMI
- 0.24 BASI DI MATRICI
- 1 HAI QUALCHE DOMANDA ?
BASE DI UNO SPAZIO VETTORIALE – DEFINIZIONE
La base di uno spazio vettoriale è un insieme di vettori linearmente indipendenti tramite la cui combinazione lineare è possibile generare un spazio vettoriale V costruito sopra un campo K
Generalmente la indichiamo con la scrittura:
$$B=\left\{\ v_1,\ v_2,\ \ldots,\ v_n\right\}$$
$$B\ è\ il\ nome\ dell’insieme\ che\ identifica\ la\ base $$
$$v_1,\ v_2,\ \ldots,\ v_n\ \ sono\ gli\ n\ vettori\ linearmente\ indipendenti $$
La dimensione della base è il numero di vettori presenti nella base stessa.
$$\dim{B}=n\ \ \ $$
La dimensione della base coincide con la dimensione dello spazio vettoriale
ALCUNI SEMPLICI ESEMPI DI BASE DI UNO SPAZIO VETTORIALE
In quasi tutti gli esempi faremo riferimento a vettori costruiti sopra il campo 𝐑 dei numeri reali.
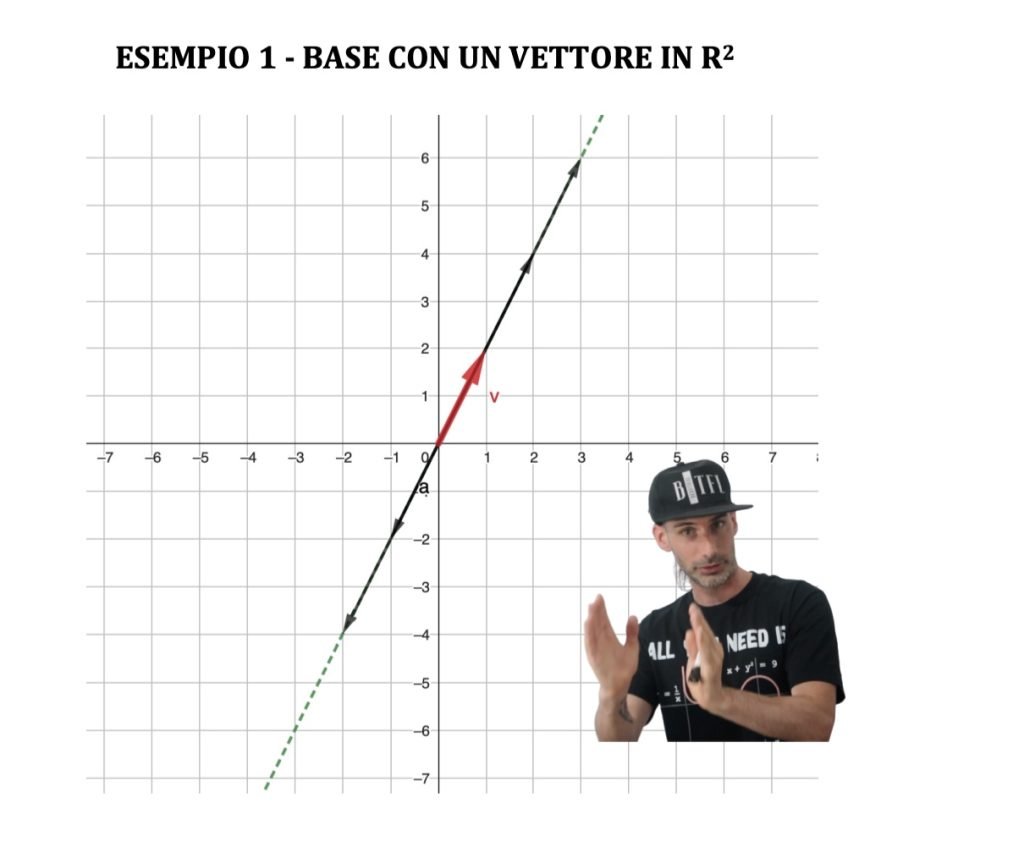
ESEMPIO 1 – BASE CON UN VETTORE IN R2
Consideriamo una base composta da un vettore con due componenti
$$v=\left(\begin{matrix}1\\2\\\end{matrix}\right)\ \ \ $$
Indichiamo la base con B
$$B=\left\{\left(\begin{matrix}1\\2\\\end{matrix}\right)\right\}\ \ \ $$
La dimensione della base e dello spazio vettoriale è pari ad 1.
Questo significa che lo spazio vettoriale V che viene formato coincide con R.
$$V=R\ \ \ $$
Nel grafico cartesiano vediamo tutti i vettori del tipo:
$$v^\prime=\lambda\ v=\lambda\left(\begin{matrix}1\\2\\\end{matrix}\right)=\left(\begin{matrix}\lambda\\2\lambda\\\end{matrix}\right)$$
che sono multipli del vettore v della base.
Fanno parte di questo spazio vettoriali i vettori:
$$v_1=\left(\begin{matrix}1\\2\\\end{matrix}\right)\ \ \ \ \ \ v_2=\left(\begin{matrix}2\\4\\\end{matrix}\right)\ \ \ \ \ \ \ v_3=\left(\begin{matrix}3\\6\\\end{matrix}\right)\ \ \ \ \ \ \ \ v_4=\left(\begin{matrix}-1\\-2\\\end{matrix}\right)\ \ \ \ \ \ \ \cdots$$
In pratica si tratta di una retta passante per il centro dove la y è il doppio della x, ovvero la retta:
$$r:\ \ \ \ y=2x\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Per approfondire visita il corso di algebra lineare.
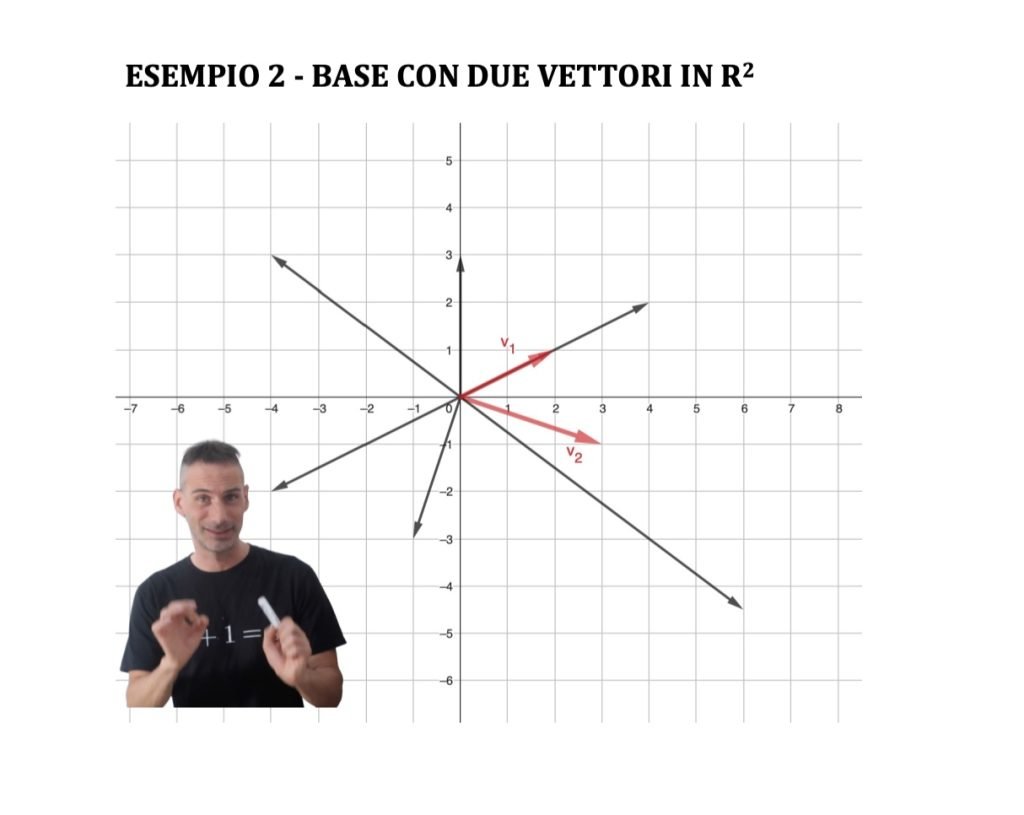
ESEMPIO 2 – BASE CON DUE VETTORI IN R2
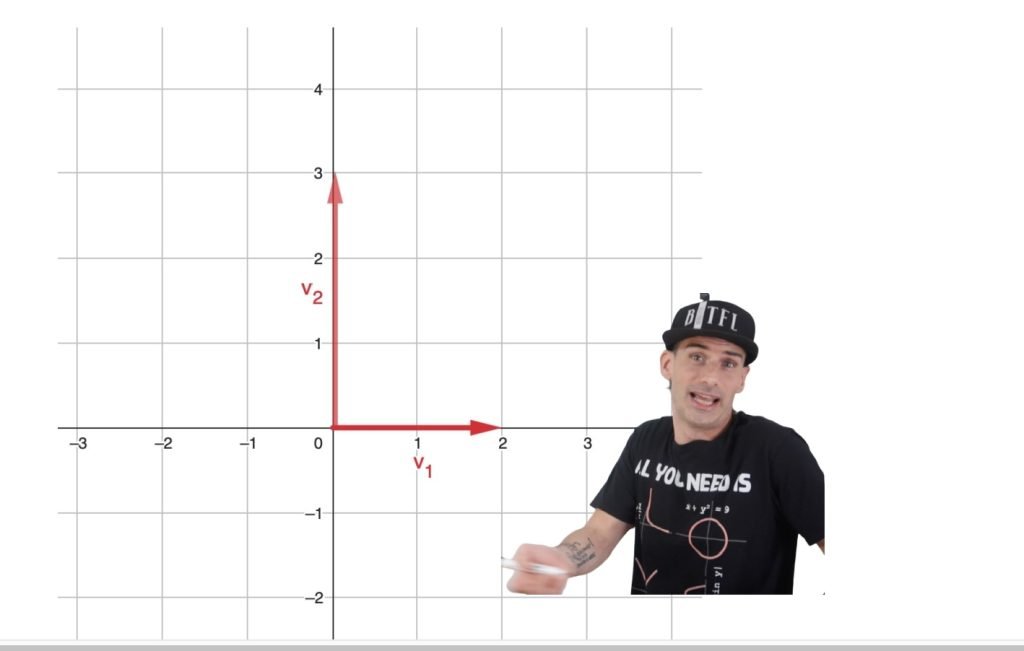
Consideriamo una base composta da due vettori con due componenti
$$v_1=\left(\begin{matrix}1\\2\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ \ v_2=\left(\begin{matrix}3\\-1\\\end{matrix}\right)\ $$
Indichiamo la base con B
$$B=\left\{\left(\begin{matrix}1\\2\\\end{matrix}\right)\ \ \left(\begin{matrix}3\\-1\\\end{matrix}\right)\right\}$$
La dimensione della base e dello spazio vettoriale è pari a 2.
Questo significa che lo spazio vettoriale V che viene formato coincide con R2 cioè con l’intero piano cartesiano
$$V=R^2\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Nel grafico cartesiano vediamo tutti i vettori del tipo:
$$v^\prime=\lambda_1v_1+\lambda_2v_2$$
$$v^\prime=\lambda_1\left(\begin{matrix}1\\2\\\end{matrix}\right)+\lambda_2\left(\begin{matrix}\mathbf{3}\\-\mathbf{1}\\\end{matrix}\right)=\left(\begin{matrix}\lambda_1+3\lambda_2\\2\lambda_1-\lambda_2\\\end{matrix}\right) $$
che sono combinazioni lineari dei vettori v1 e v2.
(al posto di 𝜆1 𝜆2 potete usare 𝜆 𝜇 oppure t s oppure a b )
Fanno parte di questo spazio vettoriali i vettori:
$${v\prime}_1=2v_1=\left(\begin{matrix}2\\4\\\end{matrix}\right)\ \ \ \ \ v_2^\prime=3v_2=\left(\begin{matrix}9\\-3\\\end{matrix}\right)\ \ \ \ \ \ \ v_3^\prime=v_1+v_2=\left(\begin{matrix}4\\1\\\end{matrix}\right)\ \ \ \ \ \ \ v_4=3v_1-2v_2\ \ \ \ldots $$
I suoi vettori toccano tutti i punti del piano cartesiano
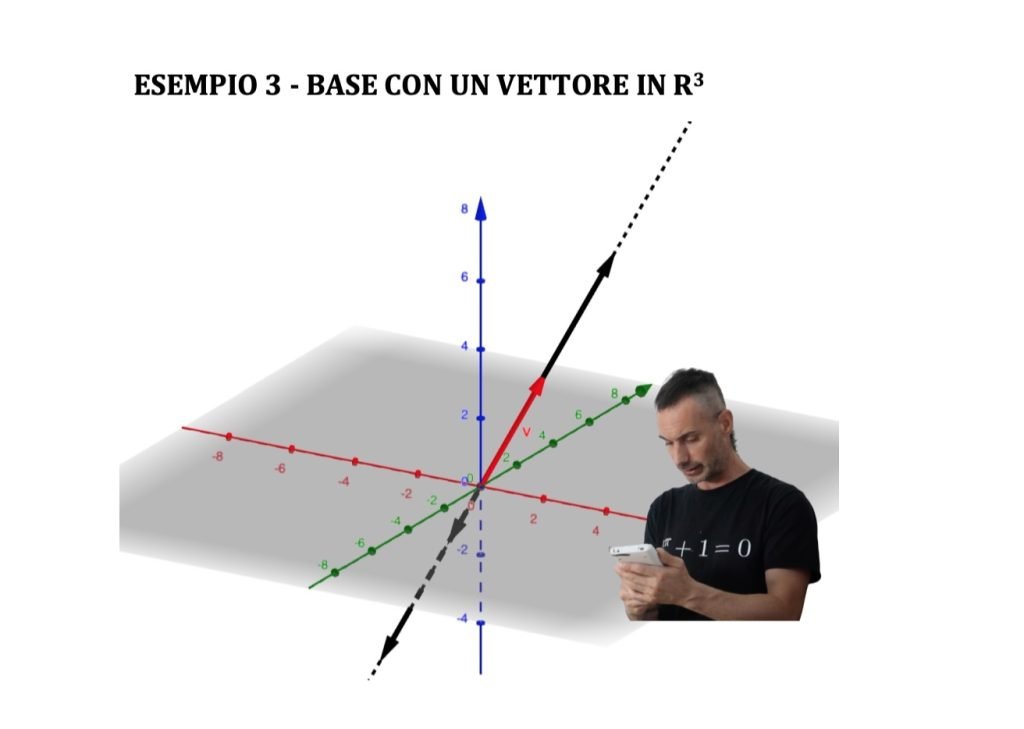
ESEMPIO 3 – BASE CON UN VETTORE IN R3
Consideriamo una base composta da un unico vettore di tre componenti
$$v=\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Indichiamo la base con B
$$B=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \right\}\ \ \ \ \ \ \ \ \ $$
La dimensione della base e dello spazio vettoriale è pari ad 1.
Questo significa che lo spazio vettoriale V è R
$$V=R\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Nel grafico cartesiano vediamo tutti i vettori del tipo:
$$v^\prime=\lambda\ v=\lambda\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \ =\left(\begin{matrix}\lambda\\2\lambda\\3\lambda\\\end{matrix}\right)\ \ $$
che sono multipli del vettore v.
Fanno parte di questo spazio vettoriali i vettori:
$${v\prime}_1=2v=\left(\begin{matrix}2\\4\\6\\\end{matrix}\right)\ \ \ \ \ v_2^\prime=3v=\left(\begin{matrix}3\\6\\9\\\end{matrix}\right)\ \ \ \ \ \ \ v_3^\prime=-v=\left(\begin{matrix}-1\\-2\\-3\\\end{matrix}\right)\ \ \ \ \ldots $$
Sono tutti i vettori di una retta
$$\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)=t\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)$$
Scopri i corsi di matematica
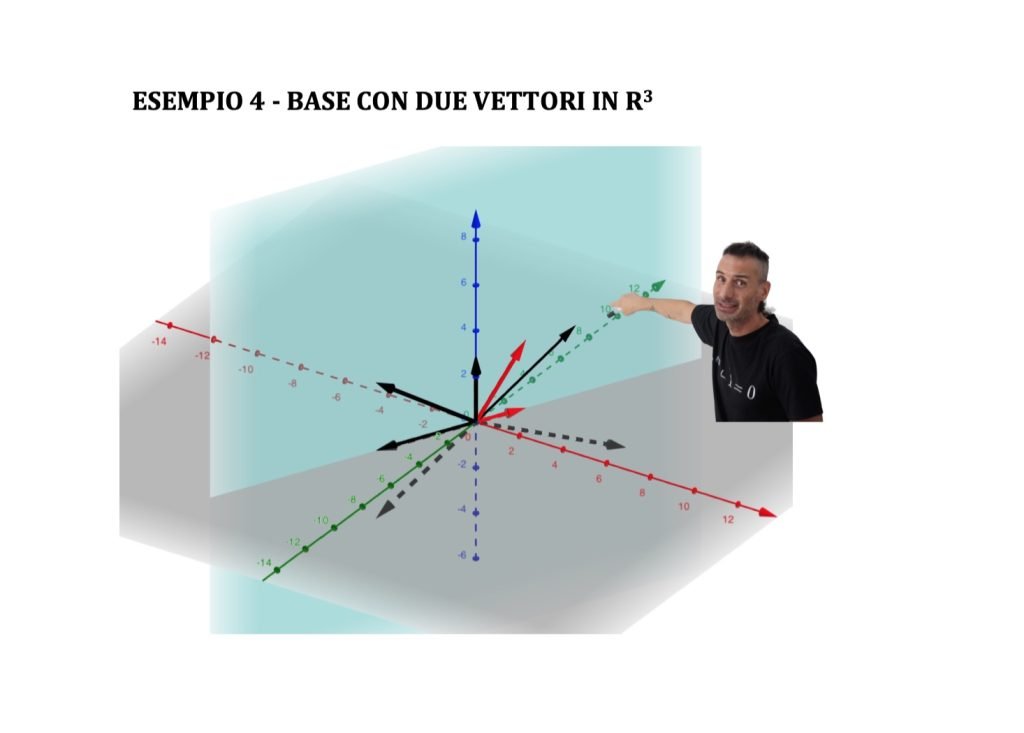
ESEMPIO 4 – BASE CON DUE VETTORI IN R3
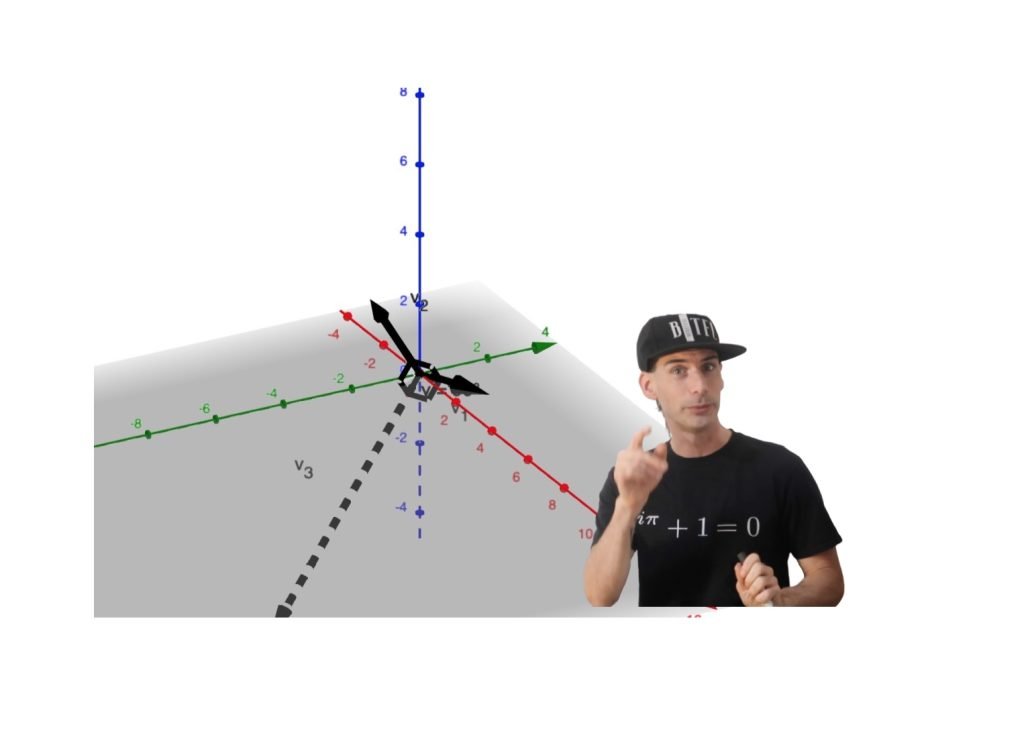
Consideriamo una base composta da due vettori di tre componenti
$$v_1=\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ v_2=\left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ $$
Indichiamo la base con B
$$B=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ \right\}$$
La dimensione della base e dello spazio vettoriale è pari ad 2.
Questo significa che lo spazio vettoriale V è R2 ovvero un piano nello spazio
$$V=R^2\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Nel grafico cartesiano vediamo tutti i vettori del tipo:
$$v^\prime=\lambda_1v_1+\lambda_2v_2\ \ $$
$$v^\prime=\lambda_1\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)+\lambda_2\left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ =\left(\begin{matrix}\lambda_1+3\lambda_2\\2\lambda_1-\lambda_2\\3\lambda_1\\\end{matrix}\right)\ \ $$
che sono una combinazione lineare dei vettori v1 e v2.
Fanno parte di questo spazio vettoriali i vettori:
$${v\prime}_1=2v_1=\left(\begin{matrix}2\\4\\6\\\end{matrix}\right)\ \ \ \ \ v_2^\prime=3v_2=\left(\begin{matrix}9\\-3\\0\\\end{matrix}\right)\ \ \ \ \ \ \ v_3^\prime=3v_1-v_2=\left(\begin{matrix}0\\7\\9\\\end{matrix}\right) $$
Sono tutti i vettori del piano
$$\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)=t\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)+s\left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)$$
ESEMPIO 4 – BASE CON TRE VETTORI IN R3
Consideriamo una base composta da tre vettori di tre componenti
$$v_1=\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ v_2=\left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ \ \ \ \ \ \ \ v_3=\left(\begin{matrix}1\\-2\\3\\\end{matrix}\right)\ $$
Indichiamo la base con B
$$B=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ \left(\begin{matrix}1\\-2\\3\\\end{matrix}\right)\ \right\}$$
La dimensione della base e dello spazio vettoriale è pari ad 3.
Questo significa che lo spazio vettoriale V è R3 ovvero tutto lo spazio in tre dimensioni
$$V=R^3\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Nel grafico cartesiano vediamo tutti i vettori del tipo:
$$v^\prime=\lambda_1v_1+\lambda_2v_2\ +\lambda_3v_3$$
$$v^\prime=\lambda_1\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)+\lambda_2\left(\begin{matrix}3\\-1\\0\\\end{matrix}\right)\ +\lambda_3\left(\begin{matrix}1\\-2\\3\\\end{matrix}\right)\ =\left(\begin{matrix}\lambda_1+3\lambda_2+\lambda_3\\2\lambda_1-\lambda_2-2\lambda_3\\3\lambda_1+3\lambda_3\\\end{matrix}\right)\\ $$
che sono una combinazione lineare dei vettori v1 v2 e v3
Fanno parte ad esempio di questo spazio vettoriali i vettori:
$${v\prime}_1=2v_1-v_3=\left(\begin{matrix}-1\\5\\6\\\end{matrix}\right)\ \ \ \ \ v_2^\prime=v_1-v_2+v_3=\left(\begin{matrix}-3\\-1\\6\\\end{matrix}\right)\ \ \ \ \ $$
Sono tutti i vettori dello spazio:
$$v=\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)\ \ \ \ $$
BASI CANONICHE DI UNO SPAZIO VETTORIALE
Le basi certamente più semplici e più pratiche da utilizzare per costruire un spazio vettoriale sono le basi canoniche.
Questa base è formata da tutti vettori che hanno una componente di valore 1 e tutte le altre di valore zero.
Riportiamo qui sotto gli spazzi vettoriali V di riferimento seguiti dalla sua base canonica che chiamiamo semplicemente I associando un indice nella forma:
$$V\ \rightarrow\ \ I_k\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Partiamo dallo spazio R che può essere formata dal solo elemento unitario (1)
$$R\ \rightarrow\ \ I_1=\left\{1\ \right\}$$
Troviamo poi lo spazio R2 con la sua base canonica:
$$R^2\ \rightarrow\ \ I_2=\left\{\left(\begin{matrix}1\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\\end{matrix}\right)\ \right\}$$
Continuando abbiamo lo spazio R3
$$R^3\ \rightarrow\ \ I_3=\left\{\left(\begin{matrix}1\\0\\0\\\end{matrix}\right)\left(\begin{matrix}0\\1\\0\\\end{matrix}\right)\left(\begin{matrix}0\\0\\1\\\end{matrix}\right)\ \right\}$$
Poi abbiamo lo spazio R4 con 4 dimensioni
$$R^4\ \rightarrow\ \ I_4=\left\{\left(\begin{matrix}1\\0\\0\\0\\\end{matrix}\right)\left(\begin{matrix}0\\1\\0\\0\\\end{matrix}\right)\left(\begin{matrix}0\\0\\1\\0\\\end{matrix}\right)\left(\begin{matrix}0\\0\\0\\1\\\end{matrix}\right)\ \right\}$$
A seguire lo spazio R5 con i suoi 5 vettori di base
$$R^5\ \rightarrow\ \ I_5=\left\{\left(\begin{matrix}1\\0\\0\\0\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\0\\0\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\0\\1\\0\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\0\\0\\1\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\0\\0\\0\\1\\\end{matrix}\right)\ \ \right\}$$
E cosi via …
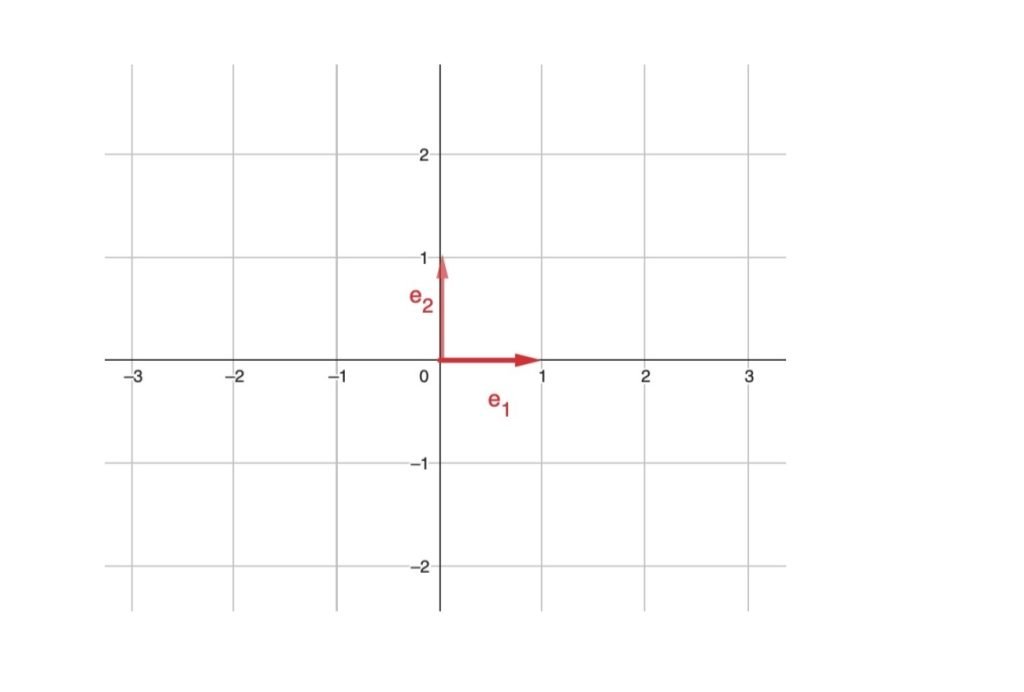
Spesso per semplificare le cose facciamo riferimento ad una scrittura sintetica chiamando questi elementi come versori fondamentali.
Indichiamo tali versori con le diciture: e1, e2, .., en.
Riscrivendo le basi in modo sintetico abbiamo partendo da R2:
$$R^2\ \rightarrow\ \ I_2=\left\{e_1\ ,\ e_2\right\}$$
Continuando abbiamo lo spazio R3
$$R^3\ \rightarrow\ \ I_3=\left\{e_1\ ,\ e_2,\ e_3\right\}$$
Poi abbiamo lo spazio R4 con 4 dimensioni
$$R^4\ \rightarrow\ \ I_4=\left\{e_1\ ,\ e_2,\ e_3,\ e_4\right\}$$
A seguire lo spazio R5 con i suoi 5 vettori di base
$$R^5\ \rightarrow\ \ I_5=\left\{e_1\ ,\ e_2,\ e_3,\ e_4,\ e_5\ \right\}$$
Per approfondire visita il corso di algebra lineare.
BASI DI UNO SPAZIO E MATRICI ASSOCIATE
Alla base di uno spazio vettoriale viene spesso associata una matrice detta matrice della base.
La matrice della base è una matrice in cui le colonne sono i vettori presenti nella base.
Per non introdurre una pesante simbologia chiamiamo semplicemente questa matrice con il nome stesso della base.
Facendo riferimento alla base canonica elenchiamo lo spazio di riferimento con la sua matrice associata alla base
$$R\ \rightarrow\ \ I_1=\left(1\right)=1$$
Troviamo poi lo spazio R2 con la sua base canonica:
$$R^2\ \rightarrow\ \ I_2=\left(\begin{matrix}\begin{matrix}1&0\\0&1\\\end{matrix}\\\end{matrix}\right) $$
Continuando abbiamo lo spazio R3
$$R^3\ \rightarrow\ \ I_3=\left(\begin{matrix}\begin{matrix}1&0&0\\0&1&0\\0&0&1\\\end{matrix}\\\end{matrix}\right) $$
Poi abbiamo lo spazio R4 con 4 dimensioni
$$R^4\ \rightarrow\ \ I_4=\left(\begin{matrix}\begin{matrix}1&0&0&0\\0&1&0&0\\0&0&1&0\\0&0&0&1\\\end{matrix}\\\end{matrix}\right) $$
A seguire lo spazio R5 con i suoi 5 vettori di base
$$R^5\ \rightarrow\ \ I_5=\left(\begin{matrix}\begin{matrix}1&0&0&0&0\\0&1&0&0&0\\0&0&1&0&0\\0&0&0&1&0\\0&0&0&0&1\\\end{matrix}\\\end{matrix}\right) $$
BASE NON CANONICA DI UNO SPAZIO VETTORIALE
Per ogni spazio vettoriale oltre alla base canonica esistono altre infinite basi che possiamo chiamare genericamente B
Prendiamo come riferimento gli spazi R R2 e R3 e di ognuno elenchiamo due possibili basi

$$R\ \rightarrow\ \ B_1=\left\{2\ \right\}\ \ \ \ \ \ \ B_2=\left\{3\ \right\}\ $$
Troviamo poi lo spazio R2 con la sua base canonica:
$$R^2\ \rightarrow\ \ B_1=\left\{\left(\begin{matrix}1\\2\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\\end{matrix}\right)\ \right\}\ \ \ \ \ B_2=\left\{\left(\begin{matrix}3\\-1\\\end{matrix}\right)\ \left(\begin{matrix}2\\13\\\end{matrix}\right)\ \right\} $$
(Da notare che avremmo potuto utilizzare anche due vettori con 3 o più componenti)
Continuando abbiamo lo spazio R3
$$R^3\ \rightarrow\ \ B_1=\left\{\left(\begin{matrix}1\\0\\0\\\end{matrix}\right)\left(\begin{matrix}-1\\1\\0\\\end{matrix}\right)\left(\begin{matrix}0\\3\\2\\\end{matrix}\right)\ \right\}\ \ \ \ \ \ B_2=\left\{\left(\begin{matrix}1\\0\\0\\\end{matrix}\right)\left(\begin{matrix}4\\1\\0\\\end{matrix}\right)\left(\begin{matrix}0\\-3\\1\\\end{matrix}\right)\ \right\}$$
ESEMPI DI NON BASE
Per comprendere meglio il concetto base vediamo qualche esempio di non base spiegandone anche la motivazione
NON BASI DI R2
Consideriamo ad esempio lo spazio vettoriale R2
Partiamo dalla seguente basi composta da un vettore
$$A_1=\left\{\ \left(\begin{matrix}2\\1\\\end{matrix}\right)\ \right\}\ \ \ \ A_2=\left\{\left(\begin{matrix}4\\1\\0\\\end{matrix}\right)\right\}$$
Queste non possono generare tutti i vettori di un piano ma solamente di una retta.
Per generare uno spazio R2 abbiamo bisogno di almeno due vettori linearmente indipendenti.
Consideriamo ora questi altri esempi di basi
$$A_1=\left\{\ \left(\begin{matrix}1\\1\\\end{matrix}\right)\ \left(\begin{matrix}2\\2\\\end{matrix}\right)\ \right\}\ \ \ \ A_2=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}2\\4\\6\\\end{matrix}\right)\right\}$$
In questo caso non siamo di fronte ad una base poiché i due vettori sono multipli e quindi linearmente dipendenti.
Vediamo ora un terzo esempio
$$A_1=\left\{\ \left(\begin{matrix}1\\1\\\end{matrix}\right)\ \left(\begin{matrix}0\\2\\\end{matrix}\right)\ \left(\begin{matrix}1\\3\\\end{matrix}\right)\right\}\ \ \ \ A_2=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}2\\0\\5\\\end{matrix}\right)\ \left(\begin{matrix}3\\2\\8\\\end{matrix}\right)\right\}$$
In questo caso i tre vettori non costituiscono una asse di R2 pur essendo un insieme di generatori.
Tra i due vettori ce ne sono certamente due che sono linearmente indipendenti in quanto non sono multipli, ma si vede chiaramente che il terzo vettore è una combinazione lineare dei primi due.
Infatti il terzo vettore altro non è che la somma dei primi due
Per approfondire visita il corso di algebra lineare.
DIFFERENZA TRA BASE E GENERATORI
Una base è sicuramente un insieme di generatori di uno spazio vettoriale.
Mentre un insieme di generatori non è detto che costituisca una base.
La differenza si trova nella definizione stessa di base.
Una base è un insieme di vettori che sono linearmente indipendenti.
Ad esempio gli insiemi:
$$B_1=\left\{\ \left(\begin{matrix}1\\1\\\end{matrix}\right)\ \left(\begin{matrix}0\\2\\\end{matrix}\right)\ \right\}\ \ \ \ B_2=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}2\\0\\5\\\end{matrix}\right)\ \right\}$$
sono certamente basi di R2 in quanto hanno due vettori che sono non multipli e quindi linearmente indipendenti
Mentre gli insiemi:
$$A_1=\left\{\ \left(\begin{matrix}1\\1\\\end{matrix}\right)\ \left(\begin{matrix}0\\2\\\end{matrix}\right)\ \left(\begin{matrix}1\\-1\\\end{matrix}\right)\ \ \right\}\ \ \ \ A_2=\left\{\left(\begin{matrix}1\\2\\3\\\end{matrix}\right)\ \left(\begin{matrix}2\\0\\5\\\end{matrix}\right)\ \left(\begin{matrix}-1\\2\\-2\\\end{matrix}\right)\right\}$$
Nel primo caso A1 i primi elementi :
$$\left(\begin{matrix}1\\1\\\end{matrix}\right)\ \left(\begin{matrix}0\\2\\\end{matrix}\right) $$
Costituiscono certamente una base di R2 dunque sono in grado di formare tutti i vettori che si trovano sul piano incluso il terzo elemento dell’insieme.
Dunque questo ultimo risulta linearmente dipendente dai primi.
Nel secondo caso potrebbe essere un po’ più difficile stabile se il terzo elemento è combinazione dei primi due.
Per stabilirlo possiamo studiare il rango della matrice con il metodo dei determinanti.
Se il determinante risulta pari a zero i vettori indipendenti non possono essere tre.
$$\left|\begin{matrix}1&2&-1\\2&0&2\\3&5&-2\\\end{matrix}\right|=0$$
Essendo il determinante nullo il terzo vettore dell’insieme di generatori di R2 è certamente combinazione lineare dei primi due, in particolare si può dimostrare che:
$$v_3=v_1-v_2\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
BASI ORTOGONALI E ORTONORMALI
Le basi ortogonali di uno spazio vettoriale sono basi in cui tutte le coppie di vettori sono perpendicolari (ortogonali).
Le basi ortonormali sono basi ortogonali in cui il modulo dei vettori vale 1.
La base canonica risulta sia ortogonale che ortonormale.
Data una base ortogonale formata dai vettori v1, v2, …, vn
$$B_\bot=v_1,\ v_2,\ \ldots,\ v_n\ $$
allora si verifica che coppia vi e vj il loro prodotto scalare vale zero.
$$\forall i,j\ \ \rightarrow\ \ v_i·vj=0$$
Se partiamo da una qualsiasi base di uno spazio è possibile costruire una base ortogonale adottando a procedura di Gram-Schmidt
Se vogliamo rendere una base ortogonale anche ortonormale dividiamo ogni vettore per il suo modulo o norma.
$$B_\bot^\ast=\left\{\frac{v_1}{\left|v_1\right|},\frac{v_2}{\left|v_2\right|},\ \ldots,\frac{v_n}{\left|v_n\right|}\ \right\}$$
LA BASE CANONICA È SIA ORTOGONALE CHE ORTONORMALE
Partiamo ad esempio dalla base canonica di R2 che chiamiamo I(R2)
$$R^2\ \rightarrow\ \ I_2=\left\{\left(\begin{matrix}1\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\\end{matrix}\right)\ \right\}=\left\{e_1,\ e_2\right\}$$
Possiamo vedere facilmente che nel sistema cartesiano i due vettori risultano ortogonali poiché sono paralleli agli assi cartesiani.
Inoltre la loro lunghezza vale 1
Si può verificare facilmente che il prodotto scalare tra i vettori è pari a zero:
$$e_1·e_2=0$$
Se ci spostiamo in R3 abbiamo la stessa percezione con la base canonica:
$$R^3\ \rightarrow\ \ I_3=\left\{\left(\begin{matrix}1\\0\\0\\\end{matrix}\right)\left(\begin{matrix}0\\1\\0\\\end{matrix}\right)\left(\begin{matrix}0\\0\\1\\\end{matrix}\right)\ \right\}=\left\{e_1,\ e_2,\ e_3\right\}$$

Per ogni coppia di vettori è verificata la condizione che il prodotto scalare vale zero:
$$e_1\cdot e_2=0\ \ \ \ \ e_1 \cdot e_3=0\ \ \ \ \ \ e_2 \cdot e_3=0$$
Per approfondire visita il corso di algebra lineare.
ALTRI ESEMPI DI BASI ORTOGONALI E ORTONORMALI
ESEMPIO 1
Consideriamo la base ortogonale di R2:
$$R^2\ \rightarrow\ \ B\bot=\left\{\left(\begin{matrix}2\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\3\\\end{matrix}\right)\ \right\}$$
Se vogliamo renderla ortonormale basta che dividiamo ogni vettore per la sua norma
$$\left|v_1\right|=2\ \ \ \ \ \ \ \ \ \ \left|v_2\right|=3$$
$$B^\ast\bot=\left\{\frac{\left(\begin{matrix}2\\0\\\end{matrix}\right)}{2}\frac{\left(\begin{matrix}0\\3\\\end{matrix}\right)}{3}\ \right\}=\left\{\left(\begin{matrix}1\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\\end{matrix}\right)\ \right\}$$
In questo modo riotteniamo la base canonica.
ESEMPIO 2
Sempre restando in R2 consideriamo la seguente base:
$$B\bot=\left\{\left(\begin{matrix}3\\2\\\end{matrix}\right)\ \left(\begin{matrix}2\\-3\\\end{matrix}\right)\ \right\}$$
Anche qui non è difficile verificare che i coefficienti angolari delle rette su cui questi vettori giacciono sono perpendicolari tra di loro.
Dunque la base è ortogonale.
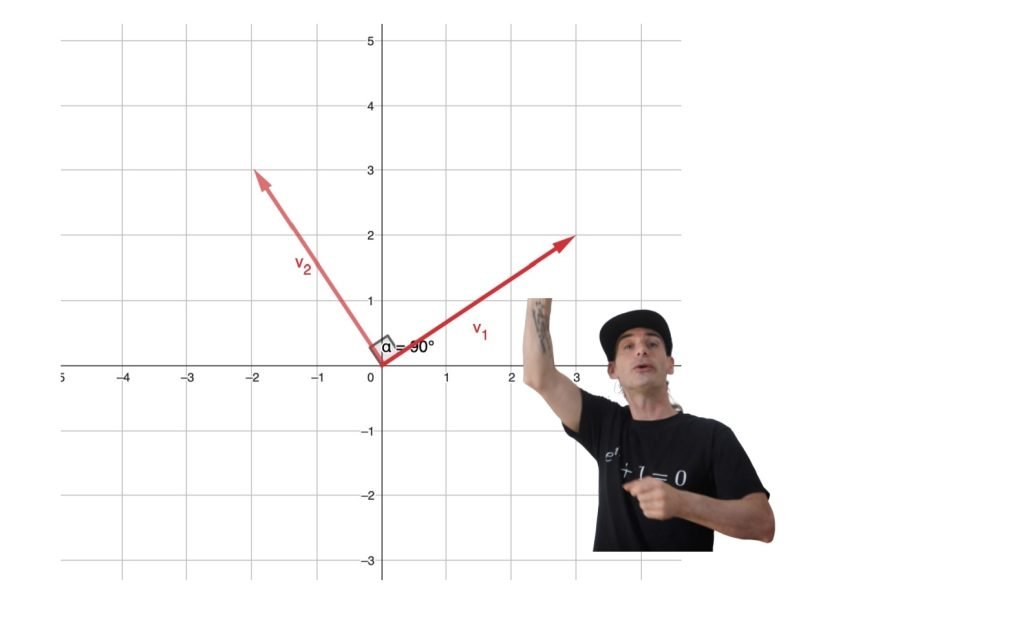
Possiamo verificare matematicamente che il prodotto scalare tra i vettori risulta pari a zero.
$$v_1·v2=32·2-3=3·2+2·-3=6-6=0$$
Per rendere anche ortonormale questa base dividiamo ogni vettore per la sua norma.
$$\left|v_1\right|=\sqrt{3^2+2^2}=\sqrt{13}$$
$$\left|v_2\right|=\sqrt{2^2+\left(-3\right)^2}=\sqrt{13}$$
$$B^\ast\bot=\left\{\frac{\left(\begin{matrix}3\\2\\\end{matrix}\right)}{\sqrt{13}}\frac{\left(\begin{matrix}2\\-3\\\end{matrix}\right)}{\sqrt{13}}\ \right\}=\left\{\left(\begin{matrix}\frac{3}{\sqrt{13}}\\\frac{2}{\sqrt{13}}\\\end{matrix}\right)\ \left(\begin{matrix}\frac{2}{\sqrt{13}}\\-\frac{3}{\sqrt{13}}\\\end{matrix}\right)\right\}$$
Per approfondire visita il corso di algebra lineare.
ESEMPIO 3
Vediamo ora un esempio di base ortogonale in R3
$$B\bot=\left\{\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)\left(\begin{matrix}1\\-2\\3\\\end{matrix}\right)\left(\begin{matrix}3\\-6\\-5\\\end{matrix}\right)\ \right\}$$
Mostriamo come i prodotti scalari tra i vettori risultano nulli
$$v_1·v_2= 210·1-23=2-2+0=0$$
$$v_1·v_3= 210·3-6-5=-6+6+0=0$$
$$v_2·v_3= 1-23·3-6-5=3+12-15=0$$
Se vogliamo rendere ortonormale la base basta che dividiamo tali vettori per la loro norma:
$$\left|v_1\right|=\sqrt{2^2+1^2+0^2}=\sqrt5$$
$$\left|v_2\right|=\sqrt{1^2+\left(-2\right)^2+3^2}=\sqrt{14}$$
$$\left|v_3\right|=\sqrt{3^2+\left(-6\right)^2+\left(-5\right)^2}=\sqrt{70}$$
La base ortonormale risulta:
$$B\bot=\left\{\frac{\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)}{\sqrt5}\frac{\left(\begin{matrix}1\\-2\\3\\\end{matrix}\right)}{\sqrt{14}}\frac{\left(\begin{matrix}3\\-6\\-5\\\end{matrix}\right)}{\sqrt{70}}\ \right\}$$
COSTRUIRE UNA BASE ORTOGONALE – GRAM-SCHMIDT
Partendo da una qualsiasi base di uno spazio vettoriale è possibile ricavare una sua base ortogonale.
Esiste al tal fine una procedura detto di Gram Schmidt che ci dice che data una base di V composta da n vettori:
$$B=\left\{\ v_1,\ v_2,\ \ldots,\ v_k,\ \ldots,\ v_n\right\}$$
È possibile costruire una corrispondente base ortogonale:
$$B\bot=\left\{\ v_1^\prime,\ v_2^\prime,\ \ldots,\ v_k^\prime,\ \ldots,\ v_n^\prime\right\}$$
dove il primo vettore è pari a v1:
$$v_1^\prime=v_1$$
ed un generico k-esimo vettore della base è dato dalla formula:
$$v_k^\prime=v_k^\prime-\sum_{i=1}^{k}\frac{v_k\cdot~v_i^\prime}{v_i^\prime\cdot~ v_i^\prime}\cdot~v_i^\prime$$
Vediamo subito un esempio e partiamo dalla base di R3:
$$B=\left\{\ \left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\ \left(\begin{matrix}2\\1\\0\\\end{matrix}\right)\ \left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ \right\}$$
Dobbiamo costruire una base ortogonale:
$$B\bot=\left\{\ v_1^\prime,\ v_2^\prime,\ v_3^\prime\right\}$$
Il primo vettore della base ortogonale B⟂ è il primo vettore è uguale al primo vettore della base B
$$v_1^\prime=v_1=\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right) $$
Il secondo vettore della base ortogonale è:
$$v_1^\prime=v_1=\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right) $$
$$v_2^\prime=v_2-\frac{v_2\cdot~ v_1^\prime}{v_1^\prime\cdot~ v_1^\prime}\cdot~ v_1^\prime$$
$$v_2^\prime=\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)-\frac{\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}{\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right) $$
$$v_2^\prime=\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)-\frac{4}{6}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)=\left(\begin{matrix}2\\1\\0\\\end{matrix}\right)-\frac{2}{3}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)=\left(\begin{matrix}2-\frac{2}{3}\\1-\frac{4}{3}\\0+\frac{2}{3}\\\end{matrix}\right)$$
Per una questione di comodità di calcoli ci conviene usare come vettore v’2 il vettore:
$$v_2^\prime=\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)$$
Questo non cambierà il calcolo del prossimo vettore come mostreremo alla fine durante i conti
Passiamo ora al terzo vettore della base ortogonale
$$v_3^\prime=v_3-\frac{v_3\cdot~ v_1^\prime}{v_1^\prime\cdot~ v_1^\prime}\cdot~ v_1^\prime-\frac{v_3\cdot~ v_2^\prime}{v_2^\prime\cdot~ v_2^\prime}\cdot~ v_2^\prime$$
$$v_3^\prime=\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ -\frac{\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}{\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)-\frac{\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ \cdot~\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)}{\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)\cdot~\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)}\cdot~\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right) $$
Da notare che se avessimo utilizzato il vettore v’2 non sarebbe cambiato niente infatti:
$$v_3^\prime=\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ -\frac{\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}{\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)}\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)-\frac{\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ \frac{1}{3}\ \left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)}{\frac{1}{3}\ \left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)\frac{1}{3}\ \left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)}\frac{1}{3}\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)$$
$$v_3^\prime=\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)\ -\frac{-2}{6}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)-\frac{4}{21}\cdot~\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right) $$
$$v_3^\prime=\left(\begin{matrix}1\\-2\\-1\\\end{matrix}\right)+\frac{1}{3}\cdot~\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)-\frac{4}{21}\cdot~\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right) $$
$$v_3^\prime=\left(\begin{matrix}1+\frac{1}{3}-\frac{16}{21}\\-2+\frac{2}{3}+\frac{4}{21}\\-1-\frac{1}{3}-\frac{8}{21}\\\end{matrix}\right)=\left(\begin{matrix}\frac{4}{7}\\-\frac{8}{7}\\-\frac{12}{7}\\\end{matrix}\right)=\frac{4}{7}·1-2-3$$
Per la stessa ragione di prima ci conviene usare il vettore a componenti intere:
$$v_3^\prime=\left(\begin{matrix}1+\frac{1}{3}-\frac{16}{21}\\-2+\frac{2}{3}+\frac{4}{21}\\-1-\frac{1}{3}-\frac{8}{21}\\\end{matrix}\right)=\left(\begin{matrix}\frac{4}{7}\\-\frac{8}{7}\\-\frac{12}{7}\\\end{matrix}\right)=\frac{4}{7}\cdot~\left(\begin{matrix}1\\-2\\-3\\\end{matrix}\right) $$
La base ortogonale che abbiamo trovato :
$$B\bot=\left\{\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\ \left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)\ \left(\begin{matrix}1\\-2\\-3\\\end{matrix}\right)\right\}$$
Verifichiamo che i prodotti scalari si annullino:
$$v_1^\prime·v_2^\prime=12-1·4-12=4-2-2=0$$
$$v_1^\prime·v_3^\prime=12-1·1-2-3=1-2+3=0$$
$$v_2^\prime·v_3^\prime=4-12·1-2-3=4+2-6=0$$
Per costruire la base ortonormale dividiamo i vettori della base per le rispettive norme:
$$\left|v_1^\prime\right|=\sqrt{1+4+1}=\sqrt6$$
$$\left|v_2^\prime\right|=\sqrt{16+1+4}=\sqrt{21}$$
$$\left|v_3^\prime\right|=\sqrt{1+4+9}=\sqrt{14}$$
$$B^\ast\bot=\left\{\frac{1}{\sqrt6}\left(\begin{matrix}1\\2\\-1\\\end{matrix}\right)\ \ \ \frac{1}{\sqrt{21}}\left(\begin{matrix}4\\-1\\2\\\end{matrix}\right)\ \ \ \frac{1}{\sqrt{14}}\left(\begin{matrix}1\\-2\\-3\\\end{matrix}\right)\right\}$$
Scopri il canale YouTube di Andrea il Matematico
BASE DI UN SOTTOSPAZIO VETTORIALE
Un sottospazio è un sottoinsieme di uno spazio vettoriale ed è a sua volta uno spazio vettoriale.
Ad esempio una retta passante per il centro è un sottospazio di un piano.
Oppure un piano passante per il centro è un sottospazio dello spazio tridimensionale R3.
Vediamo questo esempio pratico dove dobbiamo determinare una base di un sottospazio:
$$sia\ v=\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)\in\mathbb{R}^3\ \ tale\ che\ x-2y-z=0$$
Determiniamo la base del sottospazio, esplicitando la z dell’equazione:
$$x-2y-z=0\ \ \ \rightarrow\ \ z=x-2y$$
Ora riprendiamo il generico vettore v sostituendo nella terza componente il valore di z in funzione di x e y
$$\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)=\left(\begin{matrix}x\\y\\x-2y\\\end{matrix}\right) $$
Riscriviamo il vettore come combinazione di vettori isolando la x e la y
$$\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)=\left(\begin{matrix}x\\y\\x-2y\\\end{matrix}\right)=\left(\begin{matrix}x+0y\\0x+y\\x-2y\\\end{matrix}\right)=\left(\begin{matrix}x\\0x\\x\\\end{matrix}\right)+\left(\begin{matrix}0y\\y\\-2y\\\end{matrix}\right)$$
raccogliamo le x e le y dai vettori:
$$\left(\begin{matrix}x\\y\\z\\\end{matrix}\right)=x\left(\begin{matrix}1\\0\\1\\\end{matrix}\right)+y\left(\begin{matrix}0\\1\\-2\\\end{matrix}\right) $$
Si tratta di un sottospazio di R3 di dimensione 2 (un piano nello spazio) i cui vettori possono essere scritti come una combinazione lineare di di due vettori.
La base di questo sottospazio è costituita da questi due vettori:
$$B=\left\{\ \left(\begin{matrix}1\\0\\1\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\-2\\\end{matrix}\right)\right\}$$
CAMBIAMENTO DI BASE
Grazie alla base di uno spazio vettoriale è possibile riscrivere ogni vettore come combinazione lineare dei vettori di una base.
Se abbiamo una certa base B:
$$B_V=\left\{v_1,\ v_2,\ \ldots,\ v_n\right\}$$
Per qualsiasi vettore v che appartiene a V allora
$$\forall v\in V\ \rightarrow\ \ v=\sum{\lambda_iv_i}$$
ESEMPIO 1
Prendiamo come molto semplice il vettore v di R2:
$$v=\left(\begin{matrix}5\\2\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Il modo più semplice è quello di scriverlo rispetto alla base canonica I
$$I=\ \left\{\left(\begin{matrix}1\\0\\\end{matrix}\right)\ \left(\begin{matrix}0\\1\\\end{matrix}\right)\ \right\}=\left\{e_1\ ,\ e_2\right\}$$
Infatti basta usare le componenti stesse del vettore:
$$v=\left(\begin{matrix}5\\2\\\end{matrix}\right)=5\left(\begin{matrix}1\\0\\\end{matrix}\right)+2\left(\begin{matrix}0\\1\\\end{matrix}\right)=5e_1+2e_2$$
Sarebbe invece un po’ più complicato riscriverlo rispetto alla base:
$$B=\left\{\left(\begin{matrix}2\\1\\\end{matrix}\right)\ \left(\begin{matrix}-1\\0\\\end{matrix}\right)\ \right\}=\left\{v_1,v_2\right\}$$
In questo caso bisogna impostare un’equazione del tipo:
$$\lambda_1v_1+\lambda_2v_2=v$$
$$\lambda_1\left(\begin{matrix}2\\1\\\end{matrix}\right)+\lambda_2\left(\begin{matrix}-1\\0\\\end{matrix}\right)=\left(\begin{matrix}5\\2\\\end{matrix}\right) $$
questo ci porta inevitabilmente alla risoluzione del seguente sistema lineare:
$$\begin{cases}
2\lambda_1-\lambda_2=5\\
\lambda_1+0\lambda_2=2
\end{cases}$$
Dalla seconda equazione abbiamo già che il valore di 𝜆1 è:
$$\lambda_1=2\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Sostituendo nella seconda equazione ricaviamo il corrispondente valore di 𝜆2
$$2·2-λ_2=5$$
$$4-\lambda_2=5$$
$$\lambda_2=-1\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Dunque riassumendo:
$$\begin{cases} 2λ_1=2\\ λ_2=-1 \end{cases}$$
Ricordiamo che il sistema in questione:
$$\begin{cases} 2λ_1-λ_2=5 \\λ_1+0λ_2=2\end{cases}$$
può essere scritti in termini matriciali come segue:
$$\left(\begin{matrix}\begin{matrix}2&-1\\1&0\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\lambda_1\\\lambda_2\\\end{matrix}\right)=\left(\begin{matrix}5\\2\\\end{matrix}\right)\ \ \ $$
che equivale alla scrittura :
$$\lambda_1v_1+\lambda_2v_2=v$$
La prima matrice è il vettore con i vettori della base scritti in colonna che possiamo chiare B
Il secondo vettore sono le coordinate del vettore a’
Dopo l’uguale abbiamo il vettore v
$$Ba^\prime=v\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Ricordiamo che il vettore v scritto come combinazione lineare dei vettori della base canonica è:
$$v=\left(\begin{matrix}5\\2\\\end{matrix}\right)=5\left(\begin{matrix}1\\0\\\end{matrix}\right)+2\left(\begin{matrix}0\\1\\\end{matrix}\right)=5e_1+2e_2$$
Seguendo lo stesso ragionamento adottiamo la scrittura:
$$\left(\begin{matrix}\begin{matrix}1&0\\0&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}5\\2\\\end{matrix}\right)=\left(\begin{matrix}5\\2\\\end{matrix}\right)\ $$
ovvero:
$$Ia=v$$
$$ \text{I è la matrice della base canonica matrice identica}$$
Il risultato interessante è che le coordinate di un vettore scritto rispetto alla base canonica sono uguali al vettore stesso
$$\text{a è il vettore delle coordinate di v rispetto alla base canonica}$$
$$Ia=a=v$$
Dall’equazione:
$$Ba^\prime=v\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
Possiamo ricavare le nuove coordinate a’ rispetto alla bnuova base moltiplicando a sinistra e destra
$$B^{-1}Ba^\prime=B^{-1}v$$
$$a^\prime=B^{-1}v\ \ \ $$
UNA PROCEDURA PIÙ GENERALE PER IL CAMBIO DI BASE
Scelta opportunamente una base B di un ceto spazio vettoriale:
$$B_V=\left\{v_1,\ v_2,\ \ldots,\ v_n\right\}$$
È possibile riscrivere le coordinate (incolonna) del vettore v dello spazio vettoriale semplicemente moltiplicando a sinistra per la matrice inversa della nuova base
$$a^\prime=B^{-1}v\ \ \ $$
$$\text{a’ sono le coordinate del vettore v rispetto alla base}B$$
$$\text{B^{-1}\ è la matrice inversa della base B}$$
Riprendendo il caso di prima se vogliamo trovare le coordinate a’ vettore v di R2:
$$v=\left(\begin{matrix}5\\2\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
rispetto alla base B di R2
$$B=\left\{\left(\begin{matrix}2\\1\\\end{matrix}\right)\ \left(\begin{matrix}-1\\0\\\end{matrix}\right)\ \right\}=\left\{v_1,v_2\right\}$$
La matrice della base B è:
$$B=\left(\begin{matrix}\begin{matrix}2&-1\\1&0\\\end{matrix}\\\end{matrix}\right)\ \ \ \ \ \ \ $$
Dunque applicando la formula abbiamo che:
$$a^\prime=B^{-1}v\ \ \ $$
$$a^\prime=\left(\begin{matrix}\begin{matrix}2&-1\\1&0\\\end{matrix}\\\end{matrix}\right)^{-1}\ \left(\begin{matrix}5\\2\\\end{matrix}\right)=\left(\begin{matrix}\begin{matrix}0&1\\-1&2\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}5\\2\\\end{matrix}\right)=\left(\begin{matrix}2\\-1\\\end{matrix}\right) $$
Dunque :
$$v=2v_1-v_2$$
Supponendo di conoscere le coordinate a’ rispetto ad una certa base B è possibile ricavare sia le coordinate canoniche a (ovvero il vettore stesso v) che le coordinate a” rispetto ad una terza base C
In particolare:
$$a=v=Ba^\prime$$
Mentre se introduciamo la terza base C impostiamo l’equazione:
$$Ca^{\prime\prime}=Ba^\prime\ \left(=v\right) $$
Moltiplicando a sinistra di entrambi i membri per l’inversa di C otteniamo che:
$$a^{\prime\prime}=C^{-1}Ba^\prime\ \ \ \ \ \ \ \ $$
ESEMPIO
Sia a’ il vettore delle coordinate di un certo vettore v rispetto ad una base certa B.
$$a^\prime=\left(\begin{matrix}-1\\2\\3\\\end{matrix}\right)\ \ \ \ \ \ \ B=\left\{\ \left(\begin{matrix}1\\2\\0\\\end{matrix}\right)\ \left(\begin{matrix}-1\\0\\1\\\end{matrix}\right)\ \left(\begin{matrix}-2\\0\\1\\\end{matrix}\right)\right\}=\left\{v_1,v_2,\ v_3\right\}$$
Determinare le coordinate a” di v rispetto alla base C:
$$C=\left\{\ \left(\begin{matrix}1\\0\\-1\\\end{matrix}\right)\ \left(\begin{matrix}1\\1\\2\\\end{matrix}\right)\ \left(\begin{matrix}3\\1\\1\\\end{matrix}\right)\right\}=\left\{v_1^\prime,v_2^\prime,\ v_3^\prime\right\}$$
Seguendo la formula appena vista:
$$a^{\prime\prime}=C^{-1}Ba$$
$$a^{\prime\prime}=\left(\begin{matrix}\begin{matrix}1&1&3\\0&1&1\\-1&2&1\\\end{matrix}\\\end{matrix}\right)^{-1}\left(\begin{matrix}\begin{matrix}1&-1&-2\\2&0&0\\0&1&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}-1\\2\\3\\\end{matrix}\right)\ $$
$$a^{\prime\prime}=\left(\begin{matrix}\begin{matrix}-1&5&-2\\-1&4&-1\\1&-3&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}1&-1&-2\\2&0&0\\0&1&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}-1\\2\\3\\\end{matrix}\right)\ \ $$
$$a^{\prime\prime}=\left(\begin{matrix}\begin{matrix}9&-1&0\\7&0&1\\-5&0&-1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}-1\\2\\3\\\end{matrix}\right)\ $$
$$a^{\prime\prime}=\left(\begin{matrix}-11\\-4\\2\\\end{matrix}\right)\ $$
Dunque avremo che:
$$v=-11v_1^\prime-4v_2^\prime+2v_3^\prime$$
$$v=-11\left(\begin{matrix}1\\0\\-1\\\end{matrix}\right)-4\left(\begin{matrix}1\\1\\2\\\end{matrix}\right)+2\left(\begin{matrix}3\\1\\1\\\end{matrix}\right)=\left(\begin{matrix}-9\\-2\\5\\\end{matrix}\right) $$
Da notare che nella formula:
$$a^{\prime\prime}=C^{-1}Ba^\prime\left(=C^{-1}v\right)\ \ \ \ \ \ $$
Il prodotto tra la base B e il vettore delle coordinate a’ rispetto alla base B stessa risulta essere il vettore v che coincide con le coordinate di v rispetto alla base canonica di R3
$$Ba^\prime=v\ \ \ \ \ \ \ \ \ \ $$
$$v=\left(\begin{matrix}1&-1&-2\\2&0&0\\0&1&1\\\end{matrix}\right)\left(\begin{matrix}-1\\2\\3\\\end{matrix}\right)=\left(\begin{matrix}-9\\-2\\5\\\end{matrix}\right) $$
BASI DI POLINOMI E MATRICI
Le basi che fino ad ora abbiamo analizzato sono relative ai vettori in senso stretto.
Accanto a queste possiamo considerare come vettori in senso più allargato:
- Polinomi
- Matrici
- Funzioni
BASI DI POLINOMI
Preso un qualunque polinomio è possibile riscrivere le coordinate di questo polinomio in funzione della base scelta:
Vediamo un esempio molto semplice:
Consideriamo il polinomio appartenente allo spazio vettoriale dei polinomi ℝ2[x] con grado massimo pari a 2.
Un suo generico elemento è il polinomio:
$$v=p\left(x\right)=2+x-3x^2$$
Esse può essere univocamente associato rispetto alla base canonica (che potrebbe essere vista a sua volta come un vettore
$$b=\left(\begin{matrix}1&x&x^2\\\end{matrix}\right) $$
Al vettore a delle coordinate:
$$a=\left(\begin{matrix}2\\1\\-3\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ \ $$
Possiamo dunque scrivere il vettore – polinomio come il prodotto della sua base canonica b per le coordinate rispetto ad essa a:
$$v=ba=\begin{pmatrix}1 & x & x^2\end{pmatrix}\begin{pmatrix}2 \ 1 \ -3\end{pmatrix}=2+x-3x^2$$
Se volessimo riscrivere questo polinomio rispetto alla base b’:
$$b^\prime=\left(\begin{matrix}2+x&-3+x^2&{x+x}^2\\\end{matrix}\right)=\ \left(\begin{matrix}v_1&v_2&v_3\\\end{matrix}\right) $$
ci servirebbero dunque le coordinate a’ rispetto a questa base:
$$a^\prime=\ \left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right)\ \ \ \ \ \ \ \ \ \ \ \ $$
Dunque impostiamo l’equazione vettoriale:
$$b’ a’ = ab$$
In questo caso diventa difficile usare la formula vista per i vettori in senso stretto:
$$a’ = (b’)^{-1}ba$$
Dal momento che si tratta di invertire un vettore e non una matrice.
Espandendo l’equazione abbiamo:
$$\left(\begin{matrix}2+x&-3+x^2&{x+x}^2\\\end{matrix}\right)\left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right)=\left(\begin{matrix}1&x&x^2\\\end{matrix}\right)\left(\begin{matrix}2\\1\\-3\\\end{matrix}\right) $$
$$\alpha\left(2+x\right)+\beta\left(-3+x^2\right)+\gamma\left(x+x^2\right)=2+x-3x^2$$
Riscriviamo il lato di sinistra come un polinomio in x:
$$\left(2\alpha-3\beta\right)+\left(\alpha+\gamma\right)x+\left(\beta+\gamma\right)x^2=2+x-3x^2$$
Il che ci conduce inevitabilmente a questo sistema lineare con incognite 𝛼,𝛽,𝛾.
$$\begin{cases} 2\alpha-3\beta=2\\ α+γ=1\\ β+γ=-3 \end{cases}$$
Potremmo risolverlo normalmente per sostituzione oppure vederci delle matrici:
$$\left(\begin{matrix}\begin{matrix}2&-3&0\\1&0&1\\0&1&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right)=\left(\begin{matrix}2\\1\\-3\\\end{matrix}\right)\ \ \ $$
In qualche modo potremmo vedere una base B’ associata alla prima matrice:
Dunque l’equazione matriciale diventerebbe risolvibile
$$B^\prime a^\prime=a\ \ \ \rightarrow\ \ \ a^\prime={B^\prime}^{-1}a$$
$$a^\prime=\left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right) $$
Ritorniamo un attimo al polinomio iniziale:
$$v=p\left(x\right)=2+x-3x^2$$
che abbiamo riscritto come prodotto della base per le coordinate:
$$v=ba=\left(\begin{matrix}1&x&x^2\\\end{matrix}\right)\left(\begin{matrix}2\\1\\-3\\\end{matrix}\right) $$
La cosa interessante è che possiamo metterci una matrice identica in mezzo senza intaccare il risultato
$$v=bIa=\left(\begin{matrix}1&x&x^2\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}1&0&0\\0&1&0\\0&0&1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}2\\1\\-3\\\end{matrix}\right) $$
Allo stesso modo riprendiamo il polinomio rispetto alla base b’ nuova
$$v=b^\prime a^\prime=\left(\begin{matrix}2+x&-3+x^2&{x+x}^2\\\end{matrix}\right)\left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right) $$
In questo caso possiamo riscriverlo con una matrice B’ in mezzo:
$$v=bB^\prime a^\prime=\left(\begin{matrix}1&x&x^2\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}\begin{matrix}2&-3&0\\1&0&1\\0&1&1\\\end{matrix}\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\alpha\\\beta\\\gamma\\\end{matrix}\right) $$
L’equazione corretta da impostare è dunque:
$$bB^\prime a^\prime=bIa\ \ \ \ \ \ \ \ \ \ \ \ \ $$
Semplificando la B otteniamo:
$$B^\prime a^\prime=Ia\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ $$
dalla quale possiamo ricavare il nostro vettore incognito a’:
$$a^\prime=B^{-1}Ia\ \ \ \ \ \ \ \ \ \ \ \ $$
Siccome poi Il prodotto dell’inversa di B’ per l’identica altro non è che l’inversa di B’
$$B^{-1}I\ =B^{-1}\ \ \ \ \ \ \ \ \ $$
Ricaviamo il vettore a’ semplicemente moltiplicando l’inversa della nuova base (matrice B’) per il vettore a delle coordinate rispetto alla base canonica:
$$a^\prime=B^{-1}a\ \ \ \ \ \ \ \ \ \ \ \ $$
BASI DI MATRICI
Anche le matrici costituiscono spazi vettoriali ed in quanto tali hanno bisogno di una base.
Consideriamo un caso molto semplice di matrice 2×2:
$$v=A=\left(\begin{matrix}\begin{matrix}2&-1\\3&0\\\end{matrix}\\\end{matrix}\right) $$
Possiamo assumere come base canonica la seguente:
$$I=\left\{\ \left(\begin{matrix}\begin{matrix}1&0\\0&0\\\end{matrix}\\\end{matrix}\right)\ \left(\begin{matrix}\begin{matrix}0&0\\1&0\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}0&1\\0&0\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}0&0\\0&1\\\end{matrix}\\\end{matrix}\right)\right\}=\left\{\ e_1,e_2,\ e_3,\ e_4\right\}$$
Il vettore a delle coordinate della matrice A (vettore v) rispetto alla base canonica sono:
$$a=\left(\begin{matrix}2\\3\\-1\\0\\\end{matrix}\right)\ $$
Dunque possiamo scrivere la matrice come il prodotto della base per il vettore a delle coordinate:
$$A=Ia=\ \left(\left(\begin{matrix}\begin{matrix}1&0\\0&0\\\end{matrix}\\\end{matrix}\right)\ \left(\begin{matrix}\begin{matrix}0&0\\1&0\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}0&1\\0&0\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}0&0\\0&1\\\end{matrix}\\\end{matrix}\right)\right)\left(\begin{matrix}2\\3\\-1\\0\\\end{matrix}\right) $$
$$A=2\left(\begin{matrix}\begin{matrix}1&0\\0&0\\\end{matrix}\\\end{matrix}\right)+3\left(\begin{matrix}\begin{matrix}0&0\\1&0\\\end{matrix}\\\end{matrix}\right)-\left(\begin{matrix}\begin{matrix}0&1\\0&0\\\end{matrix}\\\end{matrix}\right)+0\left(\begin{matrix}\begin{matrix}0&0\\0&1\\\end{matrix}\\\end{matrix}\right) $$
$$A=2e_1+3e_2-e_3+0e_4$$
Se vogliamo riscrivere le coordinate a’ di questa matrice rispetto alla nuova base:
$$B^\prime=\left\{\ \left(\begin{matrix}\begin{matrix}1&1\\0&2\\\end{matrix}\\\end{matrix}\right)\ \left(\begin{matrix}\begin{matrix}3&0\\1&-1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}1&1\\0&-1\\\end{matrix}\\\end{matrix}\right)\left(\begin{matrix}\begin{matrix}2&0\\0&1\\\end{matrix}\\\end{matrix}\right)\right\}=\left\{\ v_1,v_2,\ v_3,\ v_4\right\}$$
Lo stratagemma consiste nel trasforma le matrici in vettori mettendo in un’unica colonna le colonne della matrice:
$$v_1=\left(\begin{matrix}\begin{matrix}1&1\\0&2\\\end{matrix}\\\end{matrix}\right)\ \rightarrow\ \ v_1=\left(\begin{matrix}1\\0\\1\\2\\\end{matrix}\right)\ $$
$$v_2=\left(\begin{matrix}\begin{matrix}3&0\\1&-1\\\end{matrix}\\\end{matrix}\right)\ \rightarrow\ \ v_2=\left(\begin{matrix}3\\0\\1\\-1\\\end{matrix}\right)\ $$
$$v_3=\left(\begin{matrix}\begin{matrix}1&1\\0&-1\\\end{matrix}\\\end{matrix}\right)\ \rightarrow\ \ v_3=\left(\begin{matrix}1\\0\\1\\-1\\\end{matrix}\right)\ $$
$$v_4=\left(\begin{matrix}\begin{matrix}2&0\\3&1\\\end{matrix}\\\end{matrix}\right)\ \rightarrow\ \ v_4=\left(\begin{matrix}2\\0\\3\\1\\\end{matrix}\right)\ $$
L’equazione da impostare è sempre la stessa: moltiplichiamo a sinistra l’inversa della nuova base per il vettore delle coordinate canoniche:
$$a^\prime=B^{-1}a=\ \left(\begin{matrix}\begin{matrix}1&3&1&2\\0&0&1&0\\1&1&0&3\\2&-1&-1&1\\\end{matrix}\\\end{matrix}\right)^{-1}·23-10≃1,69-0,383-0,77$$
Dunque abbiamo che:
$$v\simeq1,69\ v_1-0,38v_2+3v_3-0,77v_4$$
Chiaramente i calcoli sono approssimati usando il foglio Excel per la difficolta di affrontare matrici grandi utilizzando i calcoli manuali il foglio Excel per la difficolta di affrontare matrici grandi utilizzando i calcoli manuali
HAI QUALCHE DOMANDA ?
Se questo articolo ti ha fatto venire qualche domanda scrivila nei commenti.
Per approfondire visita il corso di algebra lineare.