La matrice Jacobiana di una funzione vettoriale in più variabili è una matrice le cui componenti sono le derivate parziali prime delle funzioni a più variabili.
Tali funzioni sono le componenti della funzione vettoriale.
Vediamo di darne una definizione più rigorosa.
Consideriamo una funzione vettoriale in più variabili il cui dominio è un sottoinsieme Ω di Rn che ha valori in Rm.
$$\begin{aligned}&f:\ \Omega\subseteq\mathbb{R^n}\to\mathbb{R^m}:\\&\\&f(x_1,x_2,\dots,x_n)=\begin{pmatrix} f_1(x_1,x_2,\dots,x_n)\\f_2(x_1,x_2,\dots,x_n)\\\cdots\\f_1(x_1,x_2,\dots,x_n)\end{pmatrix}\end{aligned}$$
La matrice Jacobiana associata a tale funzione risulta essere
$$MJ_f=\begin{pmatrix}\frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}&\cdots&\frac{\partial f_1}{\partial x_n}\\ \frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}&\cdots&\frac{\partial f_2}{\partial x_n}\\\cdots&\cdots&\cdots&\cdots\\\frac{\partial f_m}{\partial x_1}&\frac{\partial f_m}{\partial x_2}&\cdots&\frac{\partial f_m}{\partial x_n}\end{pmatrix}$$
Come possiamo facilmente notare si tratta di una matrice mxn.
Ovvero il numero delle righe coincide con il numero di componenti m della funzione vettoriale, che a sua volta è lo spazio vettoriale di arrivo della funzione.
Mentre il numero di colonne coincide con l’ampiezza n dello spazio vettoriale di partenza, che sono il numero delle variabili x indipendenti.
Altra cosa che possiamo facilmente notare è che ogni riga coincide con il vettore gradiente di ogni funzione (componente) della funzione vettoriale.
Quindi possiamo scrivere la matrice Jacobiana in forma sintetica in questo modo
$$MJ_f=\begin{pmatrix} \text{grad}\left(f_1(x)\right)\\\text{grad}\left(f_2(x)\right)\\\cdots\\\text{grad}\left(f_m(x)\right) \end{pmatrix}=\begin{pmatrix} \nabla\left(f_1(x)\right)\\\nabla\left(f_2(x)\right)\\\cdots\\\nabla\left(f_m(x)\right) \end{pmatrix}$$
INDICE
ESEMPI DI MATRICE JACOBIANA
Ricordiamoci di una cosa importante.
Anche la teoria più bella del mondo risulta inutile senza averla associata ad un esempio pratico.
Questo vale in ogni livello dello della teoria matematica, specialmente quando si “alza il tiro” con argomenti sempre più elevati come questo.
Quindi muniamoci di carta e penna e cominciamo subito a scrivere esempi di matrici Jacobiane.
ESEMPIO 1 – MATRICE JACOBIANA
Consideriamo la funzione vettoriale f
$$f:\ \mathbb{R^2}\to\mathbb{R^3}:\quad f(x,y)=\begin{pmatrix} x^2-y\\\log(xy)\\e^x\sin y\end{pmatrix}=\begin{pmatrix} f_1(x,y)\\f_2(x,y)\\f_3(x,y)\end{pmatrix}$$
Deriviamo ora la prima componente (funzione) rispetto alle due variabili
$$\frac{\partial f_1}{\partial x}=2x\quad\frac{\partial f_1}{\partial y}=-1$$
Passiamo ora alla seconda componente:
$$\frac{\partial f_2}{\partial x}=\frac{y}{xy}=\frac{1}{x}\quad\frac{\partial f_2}{\partial y}=\frac{x}{xy}=\frac{1}{y}$$
Ed infine alla terza:
$$\frac{\partial f_3}{\partial x}=e^x\sin y\quad\frac{\partial f_3}{\partial y}=e^x\cos y$$
Scriviamo quindi la matrice Jacobiana per esteso
$$MJ_f=\begin{pmatrix} 2x&-1\\\frac{1}{x}&\frac{1}{y}\\e^x\sin y&e^x\cos y\end{pmatrix}$$
ESEMPIO 2 – MATRICE JACOBIANA
Consideriamo la funzione vettoriale f
$$f:\ \mathbb{R^3}\to\mathbb{R^2}:\quad f(x,y,z)=\begin{pmatrix}xy\sin z\\z^2\log(x+2y)\end{pmatrix}=\begin{pmatrix} f_1(x,y,z)\\f_2(x,y,z)\end{pmatrix}$$
Deriviamo ognuna delle due componenti rispetto ad ogni variabile
$$\begin{array}{l}\frac{\partial f_1}{\partial x}=y\sin z&\frac{\partial f_1}{\partial y}=x\sin z&\frac{\partial f_1}{\partial z}=xy\cos z\\\frac{\partial f_2}{\partial x}=\frac{z^2}{x+y}&\frac{\partial f_2}{\partial y}=\frac{2z^2}{x+y}&\frac{\partial f_2}{\partial z}=2z\log(x+2y)\end{array}$$
Scriviamo quindi la matrice Jacobiana per esteso
$$MJ_f=\begin{pmatrix}y\sin z&x\sin z&xy\cos z\\\frac{z^2}{x+y}&\frac{2z^2}{x+y}&2z\log(x+2y) \end{pmatrix}$$
ESEMPIO 3 – MATRICE JACOBIANA
Consideriamo la funzione vettoriale f
$$f:\ \mathbb{R^3}\to\mathbb{R^3}:\quad f(x,y,z)=\begin{pmatrix}y\cos^2x\\frac{x}{y}+z\\e^{xy}\sin z \end{pmatrix}=\begin{pmatrix} f_1(x,y,z)\\f_2(x,y,z)\\f_3(x,y,z)\end{pmatrix}$$
Deriviamo ognuna delle due componenti rispetto ad ogni variabile
$$\begin{array}{l}\frac{\partial f_1}{\partial x}=-2y\sin x\cos x=-y\sin(2x)&\frac{\partial f_1}{\partial y}=\cos^2y&\frac{\partial f_1}{\partial z}=0\\ \frac{\partial f_2}{\partial x}=\frac{1}{y}&\frac{\partial f_2}{\partial y}=-\frac{x}{y^2}&\frac{\partial f_2}{\partial z}=1\\\frac{\partial f_3}{\partial x}=y\ e^{xy}\sin z&\frac{\partial f_3}{\partial y}=y\ e^{xy}\sin z&\frac{\partial f_3}{\partial z}=e^{xy}\cos z\\\end{array}$$
Scriviamo quindi la matrice Jacobiana per esteso
$$MJ_f=\begin{pmatrix} -y\sin(2x)&\cos^2x&0\\\frac{1}{y}&-\frac{x}{y^2}&1\\y\ e^{xy}\sin z&y\ e^{xy}\sin z&\ e^{xy}\cos z\end{pmatrix}$$
JACOBIANO: DETERMINANTE DELLA MATRICE JACOBIANA
Quando nella funzione vettoriale coincidono lo spazio di partenza e lo spazio di arrivo possiamo parlare di Jacobiano.
Lo Jacobiano è il determinante della matrice Jacobiana
Consideriamo il semplice seguente esempio
$$f:\ \mathbb{R^2}\to\mathbb{R^2}:\quad f(x,y)=\begin{pmatrix}x\cos y\\y\sin x \end{pmatrix}$$
La matrice Jacobiana 2×2 risulta
$$MJ_f=\begin{pmatrix}\cos y&x\sin y\\y\cos x&\sin x \end{pmatrix}$$
Lo Jacobiano associato alla funzione f è il determinante della matrice Jacobiana
$$J_f=\sin x\cos y-xy\sin y\cos x$$
RISCOPRI LA MATEMATICA
Prepara al meglio il tuo esame, ricostruisci le parti mancanti della matematica.
Comincia un viaggio indimenticabile ed unico che affronta tutte le tappe principali in un percorso che cambierà per sempre il tuo modo di pensare alla matematica.
LO JACOBIANO E IL CAMBIO DI VARIABILI
Lo Jacobiano è un elemento importante per analizzare i cambi di variabili.
In particolare viene utilizzato per il calcolo di aree e dei volumi quando si opera un cambiamento del sistema di riferimento.
Supponiamo di voler passare da un sistema di variabili (x,y) in un corrispondente sistema di variabili (u,v).
Supponiamo quindi che esista una funzione che trasformi le coordinate originali in (x,y) in corrispondenti coordinate (u,v).
In particolare possiamo esprimere le nuove coordinate con una funzione vettoriale del tipo
$$f:\ \mathbb{R^2}\to\mathbb{R^2}:\quad f(u,v)=\begin{pmatrix}x(u,v)\\y(u,v) \end{pmatrix}$$
Consideriamo ora un piccolo rettangolino nel sistema di origine (x,y) la cui area è pari al prodotto dx·dy
$$A_R=dx\ dy$$
Questo stesso rettangolino regolare viene trasformato nel sistema (u,v) in una figura non regolare.
Questo avviene per il fatto che le funzioni per cui esprimiamo le coordinate di x e y in funzioni delle nuove variabili u e v sono generalmente non lineari
Per calcolare la stessa area del rettangolo rispetto alle nuove coordinate usiamo la formula
$$A_R=|J_f(u,v)|\cdot du\ dv$$
Ovvero moltiplichiamo lo Jacobiano (determinante della matrice Jacobiana) della funzione f in riferimento alle nuove variabili (u,v)
Tale Jacobiano ovviamente si calcola come sempre
$$MJ_f(u,v)=\left| \begin{array}{c} \frac{\partial x}{\partial v}&\frac{\partial x}{\partial u}\\ \frac{\partial y}{\partial v}&\frac{\partial y}{\partial u}\end{array} \right|$$

Il tema è veramente molto caldo e più complesso di quant non possa apparire a prima vista.
Motivo per cui vi propongo questo altro video di approfondimento:
JACOBIANO CON IL CALCOLO DEGLI INTEGRALI
Un esempio tipico in cui viene utilizzato il concetto di Jacobiano è nella teoria del calcolo degli integrali doppi e tripli.
L’esempio più classico riguarda il passaggio dalle coordinate cartesiane (x,y) alle coordinate polari (𝜌,𝜃).
Consideriamo il seguente esempio
Calcoliamo l’integrale doppio sulla regione E
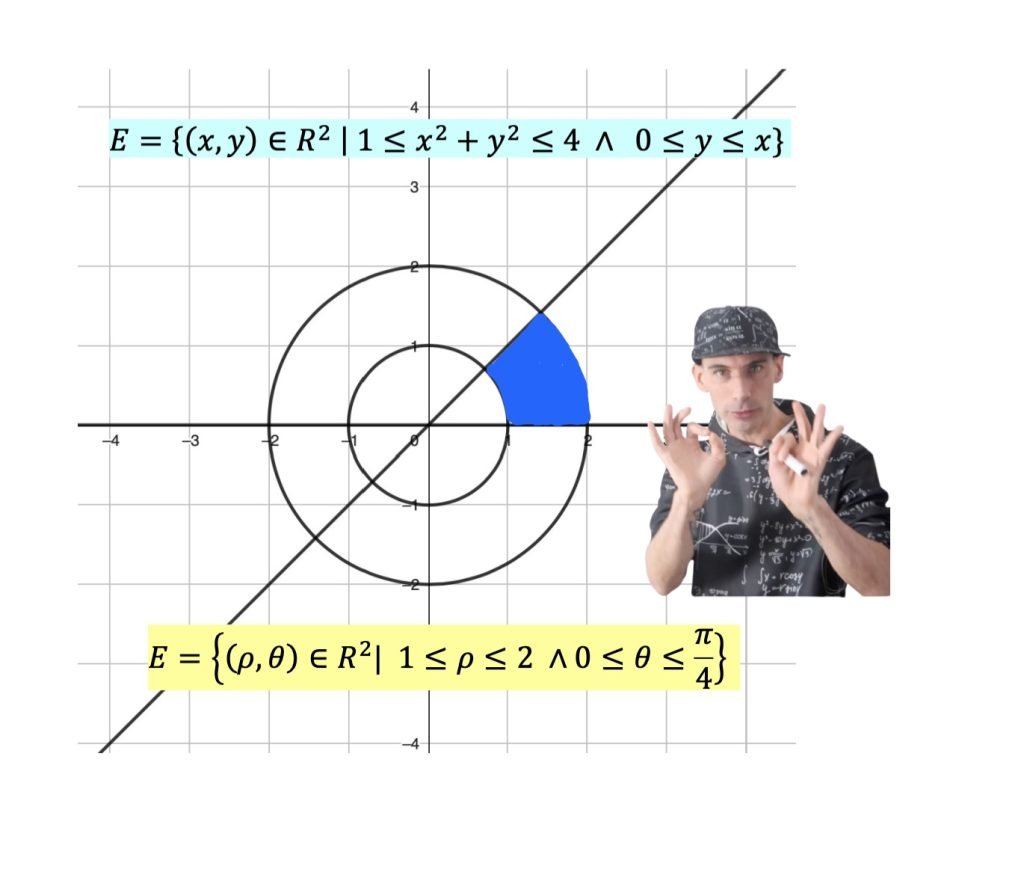
$$\begin{aligned}&I=\int_E\frac{y}{x}dx dy\\&\\&E=\{(x,y)\in\mathbb{R^2}|1\le x^2+y^2\le4\ \land\ 0\le y\le x\}\end{aligned}$$
Verifichiamo immediatamente che si tratta di un ottavo di corona circolare.
In particolare compresa tra le circonferenze con centro nell’origine e raggi 1 e 2.
Ci troviamo inoltre l’asse delle x e la bisettrice del primo e terzo quadrante.

Il modo certamente migliore per esprimere questa zona è passare alle coordinate polari (𝜌,𝜃)
Trattandosi di una circonferenza usiamo la seguente funzione vettoriale da R2 a R2
$$f(\rho,\theta)=\begin{pmatrix} \rho\cos\theta\\\rho\sin\theta\end{pmatrix}=\begin{pmatrix} x)\rho,\theta)\\y(\rho,\theta)\end{pmatrix}$$
Per esprimere la regione E facciamo viaggiare il raggio 𝜌 da 1 a 2, mentre l’angolo 𝜃 da 0 a π/4
Dunque possiamo riscrivere E in questo modo:
$$E=\{(\rho,\theta)\in\mathbb{R^2}|1\le\rho\le2\ \land\ 0\le\theta\le\frac{\pi}{4}\}$$
Attenzione che quando riscriviamo l’integrale in 𝜌 e 𝜃 nn dobbiamo assolutamente dimenticarci dello Jacobiano (in modulo)
$$I=\int_E\frac{y}{x}dx\ dy=\int_1^2\int_0^\frac{\pi}{4}\frac{\rho\sin\theta}{\rho\cos\theta}|J(\rho,\theta)|d\rho\ d\theta$$
Passiamo dunque a calcolare questo Jacobiano.
In primo luogo ci serve la matrice Jacobiana della funzione associata al cambiamento di coordinate
$$MJ_f=\begin{pmatrix}\frac{\partial x}{\partial\rho}&\frac{\partial x}{\partial\theta}\\\frac{\partial y}{\partial\rho}&\frac{\partial y}{\partial\theta} \end{pmatrix}$$
Ricordiamo un attimo la funzione
$$f(\rho,\theta)=\begin{pmatrix} \rho\cos\theta\\\rho\sin\theta\end{pmatrix}=\begin{pmatrix}x(\rho,\theta)\\y(\rho,\theta)\end{pmatrix}$$
ed ora calcoliamo la matrice Jacobiana
$$MJ_f=\begin{pmatrix}\frac{\partial x}{\partial\rho}&\frac{\partial x}{\partial\theta}\\\frac{\partial y}{\partial\rho}&\frac{\partial y}{\partial\theta} \end{pmatrix}=\begin{pmatrix} \cos\theta&-\rho\sin\theta\\\sin\theta&\rho\cos\theta\end{pmatrix}$$
Calcoliamo quindi lo Jacobiano, ovvero il determinate della matrice Jacobiana
$$J_f(\rho,\theta)=\rho\cos^2\theta+\rho\sin^2\theta=\rho(\cos^2\theta+\sin^2\theta)\rho$$
Da notare che 𝜌 è una quantità certamente positiva, in quanto raggio della circonferenza.
Dunque quando lo inseriamo nell’integrale non dobbiamo neanche preoccuparci di mettere il valore assoluto (modulo).
Ritorniamo ora al calcolo dell’integrale
$$I=\int_E\frac{y}{x}dx\ dy=\int_1^2\int_0^\frac{\pi}{4}\frac{\rho\sin\theta}{\rho\cos\theta}|J(\rho,\theta)|d\rho\ d\theta=$$
Semplifichiamo e inseriamo lo Jacobiano
$$I=\int_1^2\int_0^\frac{\pi}{4}\frac{\rho\sin\theta}{\rho\cos\theta}\rho\ d\rho\ d\theta=$$
Possiamo quindi separare gli integrali poiché vi è il prodotto
$$I=\int_1^2\rho\ d\rho\ \int_0^\frac{\pi}{4}\frac{\sin\theta}{\cos\theta}\ d\theta=$$
Da notare che si tratta di integrali immediati e che possiamo subito risolvere separatamente in quanto tutti gli estremi sono definiti
$$\begin{aligned}&\left[\frac{\rho^2}{2}\right]_1^2\cdot\left[-\log|\cos\theta|\right]_0^\frac{\pi}{4}\\&\left(2-\frac{1}{2}\right)\cdot\left(-\log\left(\cos\frac{\pi}{4}\right)+\log(\cos0)\right)=\\&\frac{3}{2}\left(\frac{1}{2}\log2-\log1\right)=\frac{3}{4}\log2\end{aligned}$$
HAI QUALCHE DOMANDA ?
Se questo articolo ti ha fatto venire qualche domanda scrivila nei commenti.
RISCOPRI LA MATEMATICA
Prepara al meglio il tuo esame, ricostruisci le parti mancanti della matematica.
Comincia un viaggio indimenticabile ed unico che affronta tutte le tappe principali in un percorso che cambierà per sempre il tuo modo di pensare alla matematica.
L’ARTICOLO TI è PIACIUTO ?
Se questo contenuto ti è piaciuto e vorresti che anche altri utenti possano goderne di questo ed altri ancora sostieni il progetto offrendomi un semplice caffè virtuale
Questo semplice gesto per me significa moltissimo e può essere un forte impulso per lo sviluppo di tutto il progetto di divulgazione matematica
Visita il canale YouTube!