In questo articolo vediamo come calcolare i punti stazionari di funzioni a due o più variabili
Partiremo dal caso più semplice ovvero nelle funzioni a due variabili.
INDICE
- 1 PUNTI STAZIONARI DI FUNZIONI A DUE O PIU VARIABILI
- 2 PUNTI STAZIONARI CON FUNZIONI A DUE VARIABILI
- 3 PUNTI STATIZIONARI PER FUNZIONI A TRE O PIU’ VARIABILI
- 4 ESEMPI DI PUNTI STAZIONARI PER FUNZIONI A DUE VARIABILI
- 5 PUNTI STAZIONARI CON FUNZIONI A TRE VARIABILI
- 6 HAI QUALCHE DOMANDA ?
- 7 RISCOPRI LA MATEMATICA
- 8 L’ARTICOLO TI è PIACIUTO ?
PUNTI STAZIONARI DI FUNZIONI A DUE O PIU VARIABILI
Cominciamo col definire il concetto di punto stazionario valido per funzioni a due variabili e generalizzabile per funzioni a più variabili.
Definiamo punto stazionario un punto P0 appartenente al dominio di f in cui si annulla il vettore gradiente
$$\begin{aligned}&f:\ \mathbb{R^n}\to\mathbb{R}\quad y=f(x_1,x_2,\dots, x_n)\\&\\&P_0\in D_f|\ \nabla f(P_0)=0\end{aligned}$$
Dire che nel punto P0 si annulla il vettore gradiente equivale a dire che in pale punto si annullano tutte le componenti del vettore gradiente.
Ricordiamo che il vettore gradiente della funzione a più variabili è il vettore ∇f le cui componenti sono
le derivate parziali prime della funzione
$$\nabla f=\begin{pmatrix}\frac{\partial f}{\partial x_1}& \frac{\partial f}{\partial x_2}&\frac{\partial f}{\partial x_n}\cdots\end{pmatrix}$$
Nel generico punto stazionario P0 si annullano tutte le componenti del vettore gradiente ovvero:
$$\nabla f(P_0)=\begin{pmatrix}\frac{\partial f}{\partial x_1}(P_0)& \frac{\partial f}{\partial x_2}(P_0)&\frac{\partial f}{\partial x_n}(P_0)\cdots\end{pmatrix}=\begin{pmatrix} 0&0&\cdots&0\end{pmatrix}$$
Per trovare quindi il punto stazionario dobbiamo quindi risolvere il sistema
$$\begin{cases} \frac{\partial f}{\partial x_1}=0\\\frac{\partial f}{\partial x_2}=0\\\cdots\\\frac{\partial f}{\partial x_n}=0\\ \end{cases}
CLASSIFICAZIONE DEI PUNTI STAZIONARI
I punti stazionari possono essere di tre tipi:
- Massimi relativi (o locali)
- Minimi relativi (o locali)
- Minimi relativi (o locali)
Per classificare i punti stazionari ci serviamo delle derivate seconde che sono riorganizzate in una matrice detta matrice Hessiana.
Distinguiamo la procedura per classificare i punti stazionari per funzioni a due variabili da quelle a tre o più variabili.
In realtà per nella funzioni a più di due variabili troviamo una teoria più generale
PUNTI STAZIONARI CON FUNZIONI A DUE VARIABILI
Quando abbiamo a che fare con funzioni a due variabili esiste un modo per classificare i punti stazionari che possono essere di : massimo, minimo oppure sella.
Per farlo ci servono le quattro derivate seconde che riorganizziamo in una matrice detta Matrice Hessiana
$$M_H=\begin{pmatrix}\frac{\partial^2f}{\partial x^2}&\frac{\partial^2f}{\partial x\partial y}\\\frac{\partial^2f}{\partial y\partial x}&\frac{\partial^2f}{\partial y^2} \end{pmatrix}=\begin{pmatrix}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{pmatrix}$$
Dopo aver sostituito le coordinate dei punti stazionari calcoliamo l’Hessiano della matrice che è il determinante della matrice Hessiana.
$$H=\left| \begin{array}{c} \frac{\partial^2f}{\partial x^2}(x_0,y_0)&\frac{\partial^2f}{\partial x\partial y}(x_0,y_0)\\\frac{\partial^2f}{\partial y\partial x}(x_0,y_0)&\frac{\partial^2f}{\partial y^2}(x_0,y_0)\end{array} \right|\\ \ \\ H=\frac{\partial^2f}{\partial x^2}(x_0,y_0)\cdot\frac{\partial^2f}{\partial y^2}(x_0,y_0)-\left(\frac{\partial^2f}{\partial x\partial y}(x_0,y_0)\right)^2$$
Se tale determinante è positivo il punto può essere un massimo oppure un minimo.
In particolare questo risulta essere un massimo relativo nel momento in cui la derivata parziale secondo rispetto alla x due volte è negativa.
$$H>0,\ \frac{\partial^2f}{\partial x^2}(x_0,y_0)<0\ \to\ (x_0,y_0)\ \text{ max relativo}$$
Mentre risulta un minimo relativo quando la derivata secondo in xx è positiva
$$H>0,\ \frac{\partial^2f}{\partial x^2}(x_0,y_0)>0\ \to\ (x_0,y_0)\ \text{ min relativo}$$
Quando invece l’Hessiano è negativo diciamo che il punto è di sella
$$H<0\ \to\ (x_0,y_0)\ \text{ punto di sella}$
PUNTI STATIZIONARI PER FUNZIONI A TRE O PIU’ VARIABILI
Per sapere se il punto stazionario di funzioni a tre o più variabili è un massimo, un minimo oppure un punto di sella dobbiamo ampliare le nostre nozioni sulle matrici.
In primo luogo cominciamo con il dire che ci serve comunque la matrice Hessiana delle derivate seconde.
Ad esempio nel caso di funzione a tre variabili questa matrice conterà ben 9 elementi e sarà del tipo:
$$M_H=\begin{pmatrix} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{pmatrix}$$
I determinanti da controllare questa volta sono 3 e sono gli elementi nord-ovest.
Comunque facciamo prima ad enunciare questa teoria ancora più generale.
Il punto stazionario è di minimo quando la matrice si dice definita positiva.
Troviamo un punto di massimo se la matrice si dice definita negativa.
Mentre nel caso in cui non abbiamo una definizione allora il punto è di sella.
MATRICE DEFINITA POSITIVA – PUNTO DI MINIMO LOCALE
Partiamo dal punto di mimino relativo o locale che si verifica quando la matrice Hessiana è definita positiva.
Questo si verifica quando i tre determinanti nord-ovest sono tutti positivi
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|>0\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|>0\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|>0$$
In altri termini se riusciamo a diagonalizzare la matrice di modo che diventi del tipo
$$M’_H=\begin{pmatrix} \lambda_1&0&0\\0&\lambda_2&0\\0&0&\lambda_3\end{pmatrix}$$
Dove 𝜆1, 𝜆2, 𝜆3 sono gli autovalori associati alla matrice
La matrice si dice definita positiva quando tutti e tre gli autovalori sono positivi
$$\lambda_1>0\quad\lambda_2>0\quad\lambda_3>0$$
Questa teoria ovviamente vale in generale in funzioni con n variabili.
Il punto si definisce di minimo se tutti gli n autovalori associati alla matrice Hessiana sono positivi!
$$\lambda_1,\lambda_2,\dots, \lambda_n>0$$
MATRICE DEFINITA NEGATIVA – PUNTO DI MASSIMO LOCALE
Abbiamo invece un punto di massimo relativo o locale quando la matrice Hessiana è definita negativa.
Questo si verifica quando i tre determinanti nord-ovest sono alternativamente negativi e positivi (a partire dal più piccolo)
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|<0\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|>0\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|<0
In altri termini se riusciamo a diagonalizzare la matrice di modo che diventi del tipo
$$M’_H=\begin{pmatrix} \lambda_1&0&0\\0&\lambda_2&0\\0&0&\lambda_3\end{pmatrix}$$
Dove 𝜆1, 𝜆2, 𝜆3 sono gli autovalori associati alla matrice
La matrice si dice definita positiva quando tutti e tre gli autovalori sono negativi
$$\lambda_1<0\quad\lambda_2<0\quad\lambda_3<0$$
Questa teoria ovviamente vale in generale in funzioni con n variabili.
Il punto si definisce di massimo se tutti gli n autovalori associati alla matrice Hessiana sono negativi!
$$\lambda_1,\lambda_2,\dots, \lambda_n<0$$
PUNTO DI SELLA (MATRICE NON DEFINITITA)
In tutti gli altri casi il punto si definisce di sella.
Prestiamo comunque una particolare attenzione a quando almeno uno dei determinanti (e quindi degli autovalori) risulta nullo.
In tale situazione potremmo avere dei forti grattacapi!
ESEMPI DI PUNTI STAZIONARI PER FUNZIONI A DUE VARIABILI
Vediamo di svolgere qualche esempio per determinare i punti stazionari per funzioni a due variabili
ESEMPIO 1 –
Calcoliamo i punti stazionari nella seguente funzione a due variabili
$$f(x,y)=y^2-xy-2x^2+3x^3-x^4$$
DERIVATE PARZIALI E GRADIENTE UGALE A ZERO
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=-y-4x+9x^2-4x^3\\&\\&\frac{\partial f}{\partial y}=f’_y=2y-x\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases} -y-4x+9x^2-4x^3=0\\ 2y-x=0\end{cases}$$
Dalla seconda equazione possiamo immediatamente ricavare la x in funzione della y
$$2y-x=0\ \to\ x=2y$$
Sostituiamo questo risultato nella prima equazione e ricaviamo un’equazione di terzo grado rispetto alla y
$$\begin{aligned}& -y-4x+9x^2-4x^3=0\\&-y-4(2y)+9(2y)^2-4(2y)^3=0\\&-y-8y+36y^2-32y^3=0\end{aligned}$$
Riordiniamo rispetto alla y di grado maggiore cambiando i segni
$$32y^3-36y^2+9y=0$$
Raccogliamo a fattor comune la y
$$y(32y^2-36y+9)=0$$
Eguagliando il primo fattore a zero ricaviamo subito il primo punto stazionario
$$y=0\ \to\ x=2\cdot0=0\ \to\ (0,0)$$
Andiamo ora ad imporre il secondo fattore uguale a zero risolvendo una equazione di secondo grado
$$32y^2-36y+9=0$$
Calcoliamo il delta quarti per vedere se l’equazione ammette soluzioni reali
$$\frac{\Delta}{4}=18^2-9\cdot32=36$$
I due valori della y calcolati con la formula risolutiva
$$y_{1,2}=\frac{18\pm6}{32}\quad\to\quad y_1=\frac{3}{4}\ \lor\ y_2=\frac{3}{8}$$
Calcoliamo dunque gli altri punti stazionari
$$\begin{array}{l} y=\frac{3}{4}&\to&x=2\cdot\frac{3}{4}=\frac{3}{2}&\to&\left(\frac{3}{2},\frac{3}{4}\right)\\ y=\frac{3}{8}&\to&x=2\cdot\frac{3}{8}=\frac{3}{4}&\to&\left(\frac{3}{4},\frac{3}{8}\right)\end{array}$$
In definitiva ecco i nostri punti stazionari
$$(0,0)\quad\left(\frac{3}{2},\frac{3}{4}\right)\quad \left(\frac{3}{4},\frac{3}{8}\right)$$
DERIVATE SECONDE E MATRICE HESSIANA
Per classificare i punti stazionari ci servono a questo punto le quattro derivate seconde che poi andiamo a riorganizzare nella matrice hessiana.
Riportiamo come promemoria le derivate parziali prime
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=-y-4x+9x^2-4x^3\\&\\&\frac{\partial f}{\partial y}=f’_y=2y-x\end{aligned}$$
Cominciamo con il calcolo delle derivate seconde
$$\begin{aligned}&\frac{\partial^2f}{\partial x^2}=f”_{xy}=-4-12x^2\\&\frac{\partial^2f}{\partial x^2}=f”_{yy}=2\\&\frac{\partial^2f}{\partial x\ \partial y}=f”_{xy}=-1=f”_{yx}=\frac{\partial^2f}{\partial y\ \partial x}\end{aligned}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix}\frac{\partial^2f}{\partial x^2}&\frac{\partial^2f}{\partial x\partial y}\\\frac{\partial^2f}{\partial y\partial x}&\frac{\partial^2f}{\partial y^2} \end{pmatrix}=\begin{pmatrix}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{pmatrix}=\begin{pmatrix}-4-12x^2&-1\\-1&2\end{pmatrix}$$
Definiamo Hessiano il determinante della matrice Hessiana
$$H=\left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|=f”_{xx}\cdot f”_{yy}-\left(f”_{xy}\right)^2\\ \ \\ H=\left| \begin{array}{c} -4-12x^2&-1\end{array}\\-1&2 \right|=2(-4-12x^2)-1=-24x^2-8$$
Possiamo facilmente notare che l’Hessiano risulta sempre negativo qualsiasi punto inseriamo.
Dunque tutti e tre i punti sono certamente punti di sella.
I tre punti stazionari trovati sono:
$$(0,0)\quad\left(\frac{3}{2},\frac{3}{4}\right)\quad \left(\frac{3}{4},\frac{3}{8}\right)$$
Calcoliamo il valore dell’hessiano (ed eventualmente della derivata parziale seconda in x) per classificare i punti
$$\begin{array}{l} H(0,0)&=&-24\cdot0^2-8=-8<0&\to&\text{punto di sella}\\ H\left(\frac{3}{2},\frac{3}{4}\right)&=&-24\cdot\left(\frac{3}{2}\right)^2-8=-62<0&\to&\text{punto di sella}\\ H\left(\frac{3}{4},\frac{3}{8}\right)&=&-24\cdot\left(\frac{3}{4}\right)^2-8=-\frac{43}{2}<0&\to&\text{punto di sella}\end{array}$$
RISCOPRI LA MATEMATICA
Prepara al meglio il tuo esame, ricostruisci le parti mancanti della matematica.
Comincia un viaggio indimenticabile ed unico che affronta tutte le tappe principali in un percorso che cambierà per sempre il tuo modo di pensare alla matematica.
ESEMPIO 2 –
Calcoliamo i punti stazionari nella seguente funzione a due variabili
$$f(x,y)=x^3-x^2y^2+x^2
DERIVATE PARZIALI E GRADIENTE UGALE A ZERO
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=3x^2-2xy^2+2x\\&\\&\frac{\partial f}{\partial y}=f’_y=-2x^2y\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases} 3x^2-2xy^2+2x=0\\2y-x=0\end{cases}$$
Raccogliamo a fattor comune la x nella prima equazione e dividiamo per –2 la seconda
$$\begin{cases} 3x^2-2xy^2+2x=0\\2y-x=0\end{cases}$$
A questo punto possiamo spezzare il sistema in 4 sistemi
$$\begin{cases}x=0\\x^2=0 \end{cases}\cup\begin{cases} x=0\\y=0\end{cases}\cup\begin{cases} 3x-2y^2+2=0\\x^2=0\end{cases}\cup\begin{cases} 3x^2-2y^2+2=0\\y=0\end{cases}$$
Dal primo e dal secondo sistema otteniamo rispettivamente i punto
$$(0,y)\quad(0,0)$$
Primo punto identifica la retta x=0, ovvero tutti i punti sull’asse delle y.
Mentre il secondo punto è una soluzione particolare del primo sistema.
Passiamo al terzo sistema
$$\begin{cases} 3x-2y^2+2=0\\x^2=0\end{cases}$$
Dalla seconda soluzione ricaviamo immediatamente che x=0 e sostituendo nella prima equazione otteniamo
$$x=0\ \to\ -2y^2+2=0\ \to\ y^2=1\ \to\ y=\pm1$$
Dalla quale ricaviamo le soluzioni
$$(0,1)\quad(0,-1)$$
Che sono altre due soluzioni particolari del primo sistema, in quanto si trovano sull’asse y
Non ci resta che risolvere l’ultimo sistema, il quarto
$$\begin{cases} 3x-2y^2+2=0\\y=0\end{cases}$$
Sostituendo il valore di y della seconda equazione nella prima otteniamo
$$3x+2=0\ \to\ x=-\frac{2}{3}\ \to\ \left(-\frac{2}{3},0\right)$$
Ricapitoliamo tutti i punti trovati
$$(0,y)\quad(0,0)\quad(0,1)\quad(0,-1)\quad\left(-\frac{2}{3},0\right)$$
DERIVATE SECONDE E MATRICE HESSIANA
Ricordiamo l’equazione della nostra funzione in due variabili:
$$f(x,y)=x^3-x^2y^2+x^2
Riportiamo come promemoria le derivate parziali prime
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=3x^2-2xy^2+2x\\&\\&\frac{\partial f}{\partial y}=f’_y=-2x^2y\end{aligned}$$
Passiamo quindi al calcolo delle derivate seconde
$$\begin{aligned}&\frac{\partial^2f}{\partial x^2}=f”_{xx}=6x-2y^2+2\\&\frac{\partial^2f}{\partial y^2}=f”_{yy}=-2x^2\\&\frac{\partial^2f}{\partial x\ \partial y}=f”_{xy}=-4xy=f”_{yx}=\frac{\partial^2f}{\partial y\ \partial x}\end{aligned}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix}\frac{\partial^2f}{\partial x^2}&\frac{\partial^2f}{\partial x\partial y}\\\frac{\partial^2f}{\partial y\partial x}&\frac{\partial^2f}{\partial y^2} \end{pmatrix}=\begin{pmatrix}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{pmatrix}=\begin{pmatrix}6x-2y^2+2&-4xy\\-4xy&-2x^2\end{pmatrix}$$
Per rendere più comodi i calcoli possiamo dividere per 2 tutte le componenti.
Dopo tutto a noi interessa calcolare i segni dei determinanti della matrice
$$M’_H=\begin{pmatrix}3x-y^2+1&-2xy\\-2xy&-x^2\end{pmatrix}$$
Calcoliamo ora l’hessiano ovvero il determinante della matrice Hessiana nei punti indicati
Partiamo con l’origine (0,0):
$$H(0,0)=\left| \begin{array}{c}1&0\\0&0 \end{array} \right|=0$$
In questo caso non siamo in grado di determinare immediatamente di che tipo di punto si tratta poiché è fuori dalla teoria.
Ci occuperemo di questo punto dopo avere determinato la natura degli altri punti
$$H(0,y)=\left| \begin{array}{c}-y^21&0\\0&0 \end{array} \right|=0$$
Anche in questo caso ci sfugge la natura di tutti i punti che si trovano sull’asse y.
Lo stesso discorso vale per i punti (0,1) e (0,–1) che sono due punti particolari sempre sull’asse y.
Li riprenderemo quando avremo determinato la natura dell’ultimo punto.
$$H\left(-\frac{2}{3},0\right)=\left| \begin{array}{c}-1&0\\0&-\frac{4}{9} \end{array} \right|=\frac{4}{9}\ \to\ f”_{xx}=-1<0\ \to\ \text{massimo}$$
Dunque con la procedura dell’Hessiano siamo stati in grado di determinare come punto di massimo relativo (–2/3, 0)
Come facciamo con gli altri punti ???
STUDIO DEL SEGNO (APPROFONDIMENTI)
Quando la procedura dell’hessiano (e dei determinanti) “fallisce” abbiamo bisogno di altri strumenti di analisi.
Tra questi strumenti è molto importante lo studio del segno della funzione.
Ritorniamo dunque all’equazione iniziale della funzione a due variabili
$$f(x,y)=x^3-x^2y^2+x^2$$
Studiare il segno della funzione significa risolvere la disequazione
$$f(x,y)>0\ \to\ x^3-x^2y^2+x^2>0$$
Raccogliamo a fattor comune il quadrato della x
$$x^2(x-y^2+1)>0$$
Prima di eliminare il fattore quadratico x2 che è sempre positivo (eccetto in x=0) ricordiamo quali sono gli zero della funzione
$$f(x,y)=0\ \to\ x=0\ \lor\ x=y^2-1$$
Dunque su una retta ed una parabola
Fatto ciò ritorniamo alla nostra disequazione espurgata del termine quadratico
$$x-y^2+1>0\ \to\ x>y^2-1$$
Ricordiamo che l’equazione:
$$x=y^2-1$$
Identifica una parabola con asse che coincide con l’asse delle y e concavità verso destra e due intersezioni con l’asse y (0,1) e (0,-1)
La disequazione in questione
$$x>y^2-1$$
Indica la zona di parabola che si trova nella parte di piano inclusa nella parabola (destra)
Mostriamolo meglio con la figura (vista dall’alto) con i segni
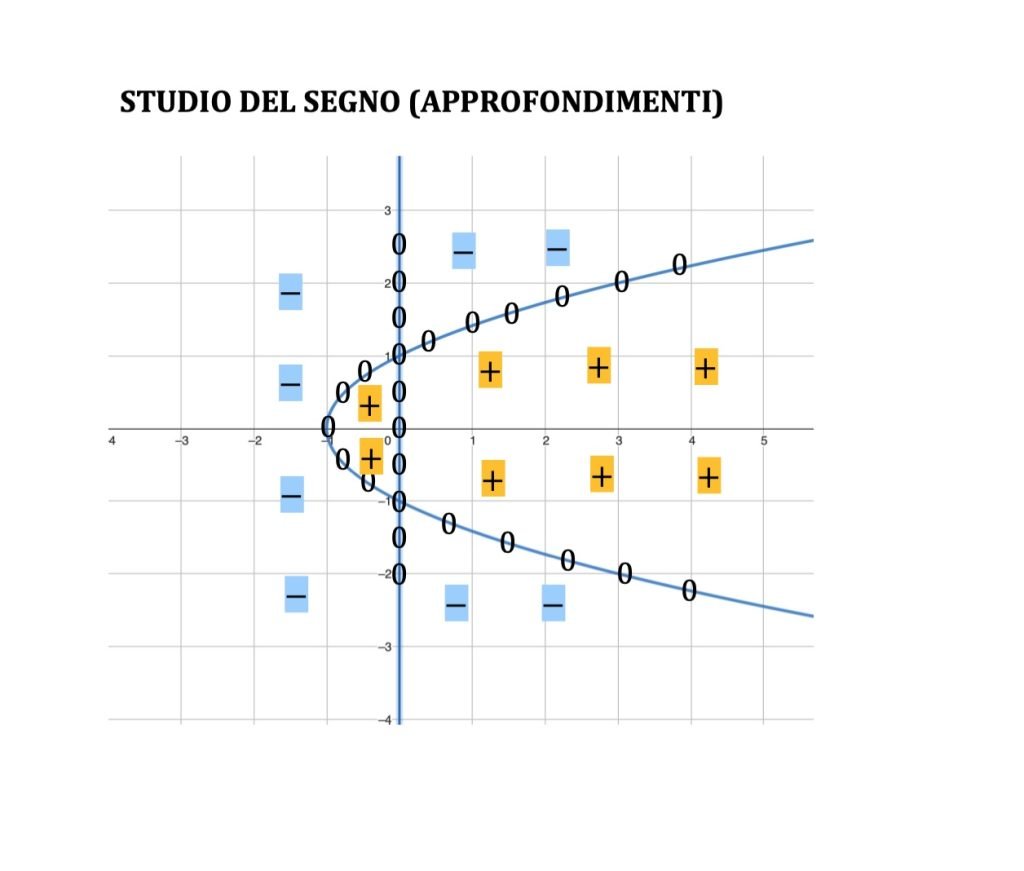
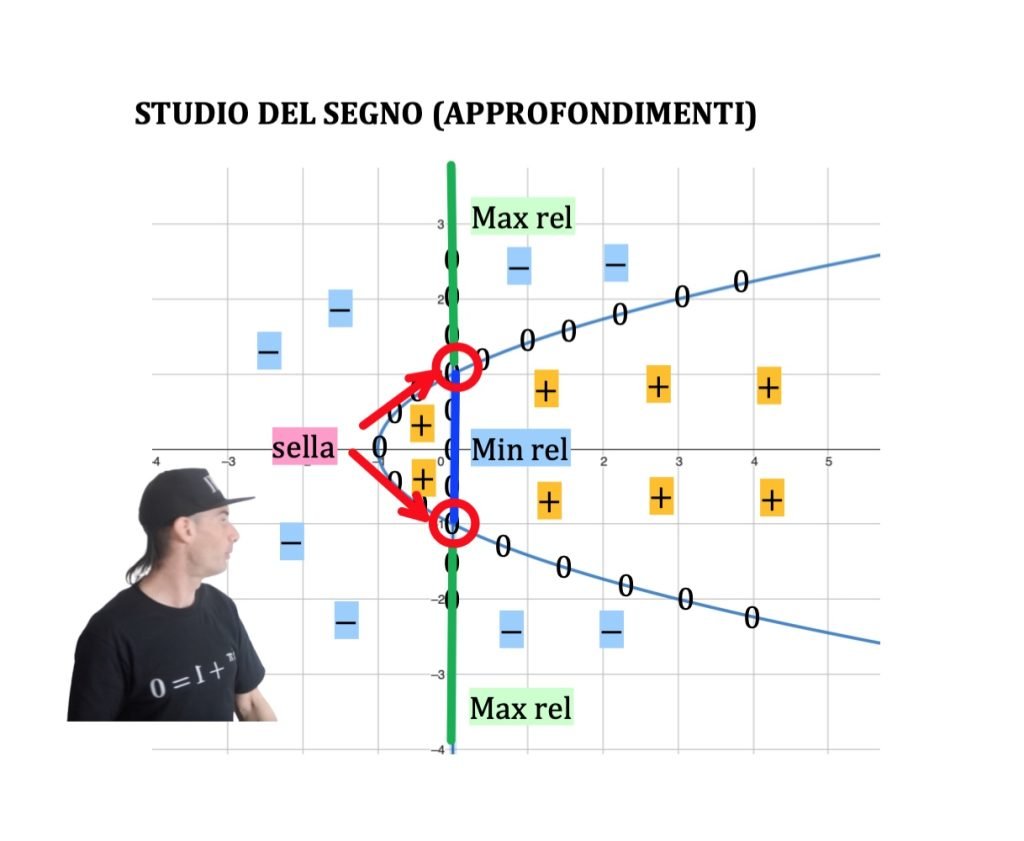
Dai segni che assume la funzione risulta facilmente comprensibile la natura dei punti che si trovano sulla retta x=0.
In particolare
$$\begin{array}{l}(0,y)&\text{con $|y|>1$}&\to&\text{massimo relativo}\\ (0,y)&\text{con $|y|<1$}&\to&\text{minimo relativo}\\ (0,y)&\text{con $|y|=1$}&\to&\text{sella} \end{array}$$
Mostriamo sotto il grafico della funzione
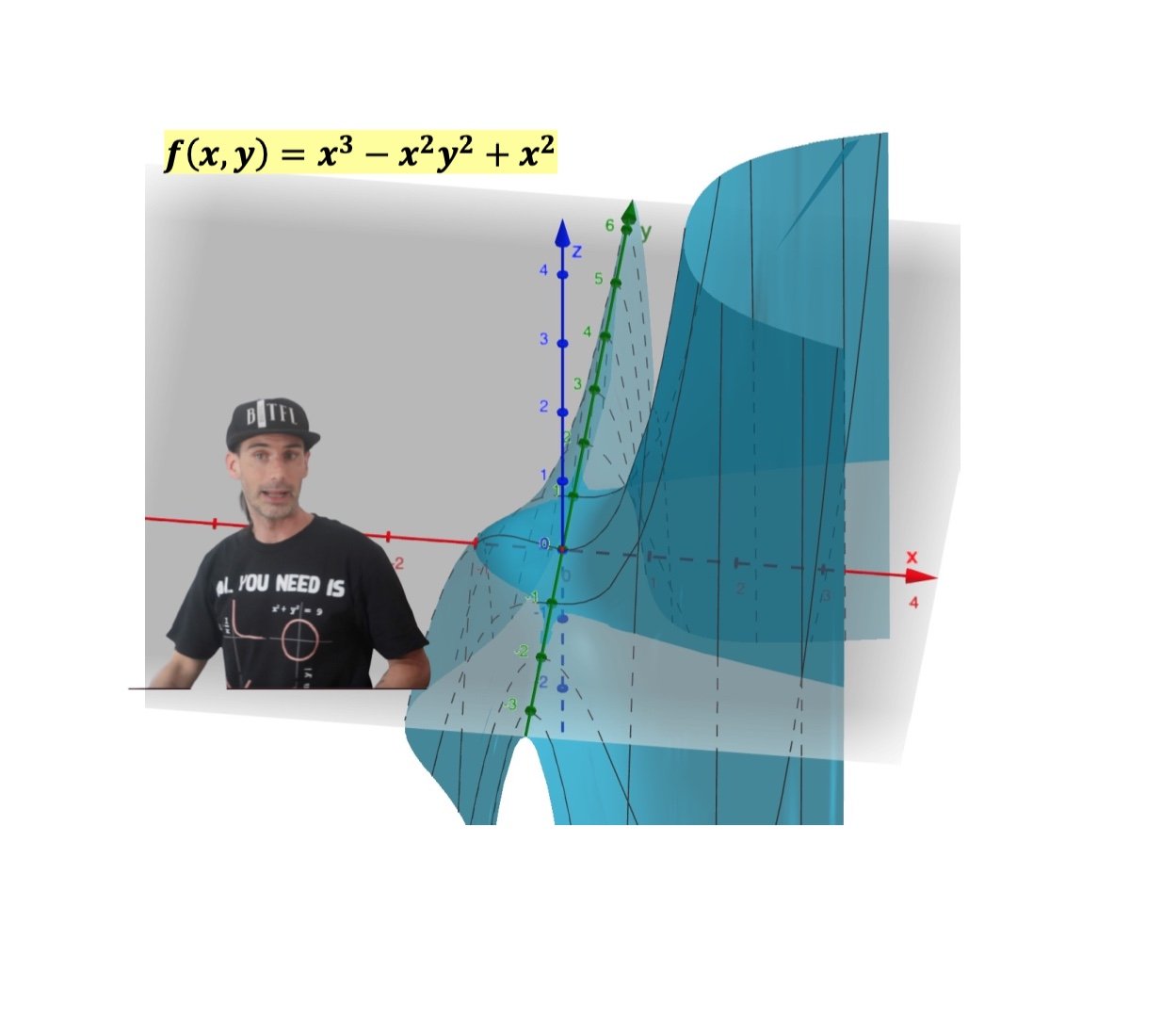
ESEMPIO 3 – PUNTI STAZIONARI CON FUNZIONI A DUE VARIABILI
Calcoliamo i punti stazionari nella seguente funzione a due variabili
$$f(x,y)=2x^4+y^4-36xy$$
DERIVATE PARZIALI E GRADIENTE UGALE A ZERO
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=8x^3-36y\\&\\&\frac{\partial f}{\partial y}=f’_y=8y^3-36x\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases} 8x^3-36y=0\\8y^3-36x =0\end{cases}$$
Ricaviamo il valore della y dalla prima equazione
$$8x^3-36y=0\ \to\ y=\frac{8}{36}x^2\ \to\ y=\frac{2}{9}x^3$$
Sostituiamo questo risultato nella seconda equazione e ricaviamo un’equazione di nono grado rispetto ad x
$$4\left(\frac{2}{9}x^3\right)^3-36x=0\ \to\ 4x\left(\frac{8}{243}x^8-9\right)=0$$
Eguagliamo il primo fattore a zero e troviamo il primo punto stazionario (origine)
$$x=0\ \to\ y=0\ \to\ (0,0)$$
Passiamo ora al secondo fattore
$$\frac{8}{243}x^8-9=0\ \to\ x=\pm\frac{3}{\sqrt[8]{8}}\ \to\ y=\pm\frac{3}{\sqrt[8]{2}}$$
Gli altri due punti stazionari sono
$$\left(\frac{3}{\sqrt[8]{8}},\frac{3}{\sqrt[8]{2}}\right)\quad\left(-\frac{3}{\sqrt[8]{8}},-\frac{3}{\sqrt[8]{2}}\right)$$
DERIVATE SECONDE E MATRICE HESSIANA
Per classificare i punti stazionari ci servono a questo punto le quattro derivate seconde che poi andiamo a riorganizzare nella matrice hessiana.
Riportiamo come promemoria le derivate parziali prime
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=8x^3-36y\\&\\&\frac{\partial f}{\partial y}=f’_y=4y^3-36x\end{aligned}$$
Cominciamo con il calcolo delle derivate seconde
$$\begin{aligned}&\frac{\partial^2f}{\partial x^2}=f”_{xy}=24x^2\\&\frac{\partial^2f}{\partial x^2}=f”_{yy}=12y^2\\&\frac{\partial^2f}{\partial x\ \partial y}=f”_{xy}=-36=f”_{yx}=\frac{\partial^2f}{\partial y\ \partial x}\end{aligned}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix}\frac{\partial^2f}{\partial x^2}&\frac{\partial^2f}{\partial x\partial y}\\\frac{\partial^2f}{\partial y\partial x}&\frac{\partial^2f}{\partial y^2} \end{pmatrix}=\begin{pmatrix}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{pmatrix}=\begin{pmatrix}24x^2&-36\\-36&12y^2\end{pmatrix}$$
Per semplicità di calcolo dividiamo tutti gli elementi per 12
$$M’_H=\begin{pmatrix} 2x^2&-3\\-3&2y^2\end{pmatrix}$$
Definiamo Hessiano il determinante della matrice Hessiana
$$H=\left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|=f”_{xx}\cdot f”_{yy}-\left(f”_{xy}\right)^2\\ \ \\ H=\left| \begin{array}{c} 2x^2&-3\\-3&2y^2\end{array} \right|=4x^2y^2-9$$
Calcoliamo quindi il valore dell’hessiano nei punti stazionari trovati
$$(0,0)\quad \left(\frac{3}{\sqrt[8]{8}},\frac{3}{\sqrt[8]{2}}\right)\quad\left(-\frac{3}{\sqrt[8]{8}},-\frac{3}{\sqrt[8]{2}}\right)$$
Determiniamo quindi la loro natura:
$$\begin{array}{l} H(0,0)&=&-9<0&\to&\text{punto di sella}\\ H\left(\frac{3}{\sqrt[8]{8}},\frac{3}{\sqrt[8]{2}}\right)&=&4\cdot\frac{81}{\sqrt{64}}-9=153>0\ \to\ f”_{xx}>0&\to&\text{punto di minimo}\\ H\left(-\frac{3}{\sqrt[8]{8}},-\frac{3}{\sqrt[8]{2}}\right)&=&4\cdot\frac{81}{\sqrt{64}}-9=153>0\ \to\ f”_{xx}>0&\to&\text{punto di minimo}\end{array}$$
ESEMPIO 4 – PUNTI STAZIONARI IN FUNZIONI A DUE VARIABILI
Calcoliamo i punti stazionari nella seguente funzione a due variabili
$$f(x,y)=(x^2-2y^2)e^{x-y}$$
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&f’_x=2xe^{x-y}+(x^2-2y^2)e^{x-y}=e^{x-y}(x^2+2x-2y^2)\\&\\&f’_y=-4ye^{x-y}-(x^2-2y^2)e^{x-y}=e^{x-y}(x^2+4y-2y^2)\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases} e^{x-y}(x^2+2x-2y^2)=0\\e^{x-y}(x^2+4y-2y^2)=0 \end{cases}$$
Dal momento che le funzioni esponenziali non possono annullarsi il sistema diventa scritto in maniera più semplice
$$\begin{cases} x^2+2x-2y^2=0\\x^2+4y-2y^2=0\end{cases}$$
Sottraiamo membro a membro a membro i termini delle due equazioni
$$2x-4y=0\ \to\ x=-2y$$
Inseriamo questo risultato nella prima equazione ricavando una equazione in y di secondo grado
$$\begin{aligned}&(2y)^2+2\cdot2t-2y^2=0\\&4y^2+4y-2y^2=0\\&2y^2+4y=0\end{aligned}$$
Raccogliamo a fattor comune il 2y
$$2y(y+2)=0$$
Da che otteniamo i due valori di y e i due corrispondenti valori della x
$$\begin{array}{l}y=0&\to&x=2\cdot0=0&\to&(0,0)\\ y=-2&\to&x=2\cdot(-2)=-4&\to&(-4,-2) \end{array}$$
DERIVATE SECONDE E MATRICE HESSIANA
Per classificare i punti stazionari ci servono a questo punto le quattro derivate seconde che poi andiamo a riorganizzare nella matrice hessiana.
Riportiamo come promemoria le derivate parziali prime
$$\begin{aligned}&\frac{\partial f}{\partial x}=f’_x=e^{x-y}(x^2+2x-2y^2)\\&\\&\frac{\partial f}{\partial y}=f’_y=e^{x-y}(x^2+4y-2y^2)\end{aligned}$$
Cominciamo con il calcolo delle derivate seconde
$$\begin{aligned}&\frac{\partial^2f}{\partial x^2}=f”_{xx}=e^{x-y}\cdot1\cdot(x^2+2x-2y^2)+e^{x-y}(2x+2)\\&\frac{\partial^2f}{\partial x^2}=f”_{xx}=e^{x-y}(x^2-2y^2+4x+2)\\&\\&\frac{\partial^2f}{\partial y^2}=f”_{yy}=e^{x-y}(x^2+4y-2y^2)-e^{x-y}(2x)\\&\frac{\partial^2f}{\partial y^2}=f”_{yy}=e^{x-y}(x^2-2y^2+8y-4)\\&\\&\frac{\partial^2f}{\partial x\ \partial y}=f”_{xy}=-e^{x-y}(x^2+2x-2y^2)+e^{x-y}(-4y)\\&\frac{\partial^2f}{\partial x\ \partial y}=f”_{xy}=-e^{x-y}(x^2-2y^2+2x+4y)\end{aligned}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix}\frac{\partial^2f}{\partial x^2}&\frac{\partial^2f}{\partial x\partial y}\\\frac{\partial^2f}{\partial y\partial x}&\frac{\partial^2f}{\partial y^2} \end{pmatrix}=\begin{pmatrix}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{pmatrix}\\ \ \\ M_H=\begin{pmatrix}e^{x-y}(x^2-2y^2+4x+2)&-e^{x-y}(x^2-2y^2+2x+4y)\\-e^{x-y}(x^2-2y^2+2x+4y)&e^{x-y}(x^2-2y^2+8y-4)\end{pmatrix}$$
Dividiamo tutto per il termine esponenziale poiché sempre positivo
$$M’_H=\begin{pmatrix}x^2-2y^2+4x+2&-(x^2-2y^2+2x+4y)\\-(x^2-2y^2+2x+4y)&x^2-2y^2+8y-4\end{pmatrix}$$
Definiamo Hessiano il determinante della matrice Hessiana
$$H=\left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|=f”_{xx}\cdot f”_{yy}-\left(f”_{xy}\right)^2$$
I punti stazionari trovati con le derivate prime sono:
$$(0,0)\quad(-4,2)$$
Determiniamone dunque la natura con l’hessiano:
$$\begin{aligned}&H(0,0)=\left| \begin{array}{c} 2&0\\0&4\end{array} \right|-8=-16<0\ \to\ \text{sella}\\&H(-4,-2)=\left| \begin{array}{c} 16-8-16+2&-(16-8-8-8)\\-(16-8-8-8)&16-8-16-4\end{array} \right|\\&H(-4,-2)=\left| \begin{array}{c}-6&8\\8&-12 \end{array} \right|=8>0\ \to\ f”_{xx}>0\ \to\ \text{massimo}\end{aligned}$$
RISCOPRI LA MATEMATICA
Prepara al meglio il tuo esame, ricostruisci le parti mancanti della matematica.
Comincia un viaggio indimenticabile ed unico che affronta tutte le tappe principali in un percorso che cambierà per sempre il tuo modo di pensare alla matematica.
PUNTI STAZIONARI CON FUNZIONI A TRE VARIABILI
Vediamo ancora un paio di esempi di punti stazionari questa volta con funzioni a tre variabili e quindi con la teoria ampliata.
ESEMPIO 1 – PUNTI STAZIONARI CON FUNZIONI A TRE VARIABILI
Calcoliamo i punti stazionari nella seguente funzione a tre variabili
$$f(x,y,z)=\frac{1}{x}+\frac{1}{y}+\frac{1}{z}+xyz$$
Cominciamo con il definire il dominio della funzione che non passa per gli assi cartesiani
$$x\ne0\ \land\ y\ne0\ \land\ z\ne0$$
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&f’_x=-\frac{1}{x^2}+yz\\&f’_y=-\frac{1}{y^2}+xz\\&f’_z=-\frac{1}{z^2}+xy\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases}-\frac{1}{x^2}+yz=0\\ -\frac{1}{y^2}+xz=0\\-\frac{1}{z^2}+xy=0 \end{cases}$$
Ora usiamo questa “furbata”: ovvero moltiplichiamo per x la prima equazione, per y la seconda equazione e per z la terza
$$\begin{cases}-\frac{1}{x}+xyz=0\\ -\frac{1}{y}+xyz=0\\-\frac{1}{z}+xyz=0 \end{cases}$$
Da che possiamo facilmente ottenere il valore di xyz da tutte e tre le equazioni
$$\begin{cases} xyz=-\frac{1}{x}\\ xyz=-\frac{1}{y}\\ xyz=-\frac{1}{z}\\ \end{cases}$$
Possiamo quindi ad esempio eguagliare per confronto la prima equazione con la seconda, la seconda con la terza e tenere intatta la terza equazione
$$\begin{cases} \frac{1}{x}=\frac{1}{y}\\\frac{1}{y}=\frac{1}{z}\\ xyz=-\frac{1}{z}\\ \end{cases}$$
Lavoriamo con i reciproci delle prime due equazioni (ribaltiamo numeratore e denominatore)
$$\begin{cases} x=y\\y=z\\ xyz=-\frac{1}{z} \end{cases}$$
È facile intuire dalle prime due equazioni che vale l’uguaglianza
$$x=y=z$$
Dunque possiamo riscrivere la terza equazione tutta rispetto alla zeta
$$xyz=\frac{1}{z}\ \to\ z^3=\frac{1}{z}\ \to\ z^4-1=0\ \to\ z=\pm1$$
Dunque i nostri punti stazionari sono
$$(1,1,1)\quad(-1,-1,-1)$$
DERIVATE SECONDE E MATRICE HESSIANA
Per classificare i punti stazionari ci servono a questo punto le nove derivate seconde che poi andiamo a riorganizzare nella matrice hessiana.
Riportiamo come promemoria le derivate parziali prime
$$f’_x=-\frac{1}{x^2}+yz\quad f’_y=-\frac{1}{y^2}+xz\quad f’_z=-\frac{1}{z^2}+xy$$
Passiamo al calcolo delle derivate seconde
$$\begin{array}{l}f”_{xx}=\frac{2}{x^3}&f”_{xy}=z &f”_{xz}=y\\ f”_{yx}=z&f”_{yy}=\frac{2}{y^3} &f”_{yz}=x\\ f”_{zx}=y &f”_{zy}=x &f”_{zz}=\frac{2}{z^3}\end{array}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz}\end{pmatrix}=\begin{pmatrix}\frac{2}{x^2}&z&y\\z&\frac{2}{y^2}&x\\y&x&\frac{2}{z^2} \end{pmatrix}$$
Analizziamo ora i determinante della matrice hessiana per determinare natura dei punti stazionari
$$(1,1,1)\quad(-1,-1,-1)$$
Partiamo dal primo punto:
M_H(1,1,1)=\begin{pmatrix} 2&1&1\\1&2&1\\1&1&2\end{pmatrix}$$
Partiamo dal determinanti (1×1) (2×2) e (3×3) nord-ovest
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|$$
Il primo è certamente positivo:
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|=|2|>0$$
Il secondo risulta positivo:
$$\left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|=\left| \begin{array}{c}2&1\\1&2 \end{array} \right|=4-1=3$$
Per il terzo determinante usiamo la regola di Laplace
$$\left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|=\left| \begin{array}{c} 2&1&1\\1&2&1\\1&1&2\end{array} \right|=\\ \ \\ 2\left| \begin{array}{c} 2&1\\1&2\end{array} \right|-\left| \begin{array}{c} 1&1\\1&2\end{array} \right|+\left| \begin{array}{c} 1&2\\1&1\end{array} \right|=6-1-1=4>0$$
Siccome i tre determinanti hanno valore positivo la matrice è definita positiva e il punto è classificato di massimo relativo.
Da notare che se avessimo diagonalizzato la matrice rendendola del tipo
$$M’_H=\begin{pmatrix} \lambda_1&0&0\\0&\lambda_2&0\\0&0&\lambda_3\end{pmatrix}$$
Avremmo trovato che tutti gli autovalori 𝜆1, 𝜆2 e 𝜆3 sarebbero positivi.
Vi lascio il video di Dario Cerroni che spiega a voce questo esercizio
ESEMPIO 2- PUNTI STAZIONARI CON FUNZIONI A TRE VARIABILI
Calcoliamo i punti stazionari nella seguente funzione a tre variabili
$$f(x,y,z)=x^2+y^2+z^2-x^2y^2$$
Cominciamo col calcolare le derivate parziali della funzione
$$\begin{aligned}&f’_x=2x-2xy^2\\&f’_y=2y-2x^2y\\&f’_z=2z\end{aligned}$$
Imponiamo ora il vettore gradiente uguale a zero
$$\nabla f=0$$
il che significa risolvere il seguente sistema in cui imponiamo uguali a zero entrambe le componenti del vettore gradiente
$$\begin{cases} 2x-2xy^2=0\\2y-2x^2y=0\\2z=0\end{cases}$$
Per rendere più comprensibile il sistema dividiamo le equazioni per 2 e fattorizziamo le prime due
$$\begin{cases} y(1+y)(1-y)=0\\y(1+x)(1-x)=0\\z=0\end{cases}$$
Considerando tutte le possibili combinazioni dei fattori otteniamo i seguenti punti stazionari
$$(0,0,0)\quad(-1,-1,0)\quad(1,-1,0)\quad(-1,1,0)\quad(1,1,0)$$
DERIVATE SECONDE E MATRICE HESSIANA
Per classificare i punti stazionari ci servono a questo punto le nove derivate secondeche poi andiamo a riorganizzare nella matrice hessiana.
Riportiamo come promemoria le derivate parziali prime
$$f’_x=2x-2xy^2\quad f’_y=2y-2x^2y\quad f’_z=2z$$
Passiamo al calcolo delle derivate seconde
$$\begin{array}{l}f”_{xx}=2-2y^2&f”_{xy}=-4xy &f”_{xz}=0\\ f”_{yx}=-4xy &f”_{yy}=2-2y^2 &f”_{yz}=0\\ f”_{zx}=0 &f”_{zy}=0 &f”_{zz}=2\end{array}$$
Ricordiamo che le derivate miste sono tra loro uguali per il teorema di Schwarz
Riorganizziamo ora le derivate seconde nella matrice hessiana in questo modo
$$M_H=\begin{pmatrix} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz}\end{pmatrix}=\begin{pmatrix}2-2y^2&-4xy&0\\-4xy&2-2x^2&0\\0&0&2 \end{pmatrix}$$
Dividiamo per 2 tutti gli elementi per rendere più semplici i calcoli
$$M_H=\begin{pmatrix}1-y^2&-2xy&0\\-2xy&1-x^2&0\\0&0&1 \end{pmatrix}$$
Analizziamo ora i determinante della matrice hessiana per determinare natura dei punti stazionari
$$(0,0,0)\quad(-1,-1,0)\quad(1,-1,0)\quad(-1,1,0)\quad(1,1,0)$$
Partiamo dall’origine:
$$M_H(0,0,0)=\begin{pmatrix} 1&0&0\\0&1&0\\0&0&1\end{pmatrix}$$
Da notare che si tratta certamente di una matrice diagonalizzata con tutti autovalori positivi, dunque la matrice è definita positiva e l’origine è un punto di minimo
Passiamo al secondo punto
$$M_H(-1,-1,0)=\begin{pmatrix} 0&-2&0\\-2&0&0\\0&0&1\end{pmatrix}$$
Studiamo i determinanti (1×1) (2×2) e (3×3) nord-ovest
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|$$
Il primo di questi è certamente nullo:
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|=|0|=0$$
Questo risultato potrebbe dare dei problemi perché lo zero è sempre un numero insidioso in questa teoria.
Fortunatamente per noi il determinante della (2×2) nord-ovest risulta negativo
$$ \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|=\left| \begin{array}{c}0&-2\\-2&0 \end{array} \right|=0-4=-4$$
Questo ci permette di escludere sia la presenza del punto di massimo che di minimo .
Ricordiamo infatti che abbiamo un minimo con questa situazione (già vista per il primo punto)
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|>0\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|>0\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|>0$$
Mentre abbiamo un punto di massimo con la matrice definita negativa, ovvero quando si verifica questa altra situazione
$$\left| \begin{array}{c}f”_{xx} \end{array} \right|<0\quad \left| \begin{array}{c}f”_{xx}&f”_{xy}\\f”_{yx}&f”_{yy} \end{array} \right|>0\quad \left| \begin{array}{c} f”_{xx}&f”_{xy}&f”_{xz}\\ f”_{yx}&f”_{yy}&f”_{yz}\\ f”_{zx}&f”_{zy}&f”_{zz} \end{array} \right|<0$$
Notiamo che in entrambi i casi il determinante della (2×2) deve risultare positivo.
Concludiamo quindi che il punto in questione (–1, –1, 0) è punto di sella!
Lo stesso identico ragionamento vale per gli altri punti
$$(1,-1,0)\quad(-1,1,0)\quad(1,1,0)$$
Che sono quindi anche loro punti di sella !!!
HAI QUALCHE DOMANDA ?
Se questo articolo ti ha fatto venire qualche domanda scrivila nei commenti.
RISCOPRI LA MATEMATICA
Prepara al meglio il tuo esame, ricostruisci le parti mancanti della matematica.
Comincia un viaggio indimenticabile ed unico che affronta tutte le tappe principali in un percorso che cambierà per sempre il tuo modo di pensare alla matematica.
L’ARTICOLO TI è PIACIUTO ?
Se questo contenuto ti è piaciuto e vorresti che anche altri utenti possano goderne di questo ed altri ancora sostieni il progetto offrendomi un semplice caffè virtuale
Questo semplice gesto per me significa moltissimo e può essere un forte impulso per lo sviluppo di tutto il progetto di divulgazione matematica
Visita il canale YouTube!