
INDICE
- 1 I VETTORI : DEFINIZIONE
- 2 I VETTORI NEL PIANO CARTESIANO
- 3 COMPONENTI, MODULO E ANGOLI DEL VETTORE – ESEMPIO
- 4 VETTORI NELLO SPAZIO
- 5 DEFINIZIONE MATEMATICA DI VETTORE
- 6 ANGOLO FORMATO DA DUE VETTORI
- 7 VETTORI RIGA E VETTORI COLONNA
- 8 IMPARA L’ALGEBRA LINEARE
- 9 OPERAZIONI TRA VETTORI
- 10 PRODOTTO SCALARE E PRODOTTO VETTORIALE
- 11 HAI QUALCHE DOMANDA ?
- 12 SCOPRI I SEGRETI DELL’ALGEBRA LINEARE
- 13 L’ARTICOLO TI è PIACIUTO ?
I VETTORI : DEFINIZIONE
I vettori sono segmenti orientati che si trovano in un piano, nello spazio e addirittura nell’iperspazio.
Sono utilizzati in fisica per descrivere grandezze che definiamo vettoriali che necessitano di una rappresentazione.
Ci riferiamo ad esempio allo spazio percorso da un oggetto, alla sua velocità, all’accelerazione, alla forma ed alla pressione.
In questo ambito tratteremo i vettori più in senso matematico e geometrico.
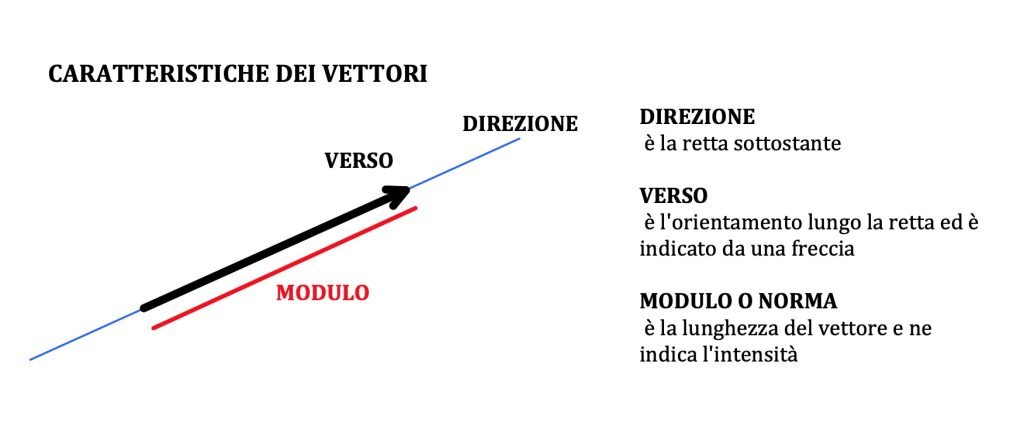
CARATTERISTICHE DEI VETTORI
Le caratteristiche principali dei vettori sono tre:
- Direzione
- Verso
- Modulo
La direzione di un vettore indica la retta lungo cui il vettore si muove.
Indica cioè la sua linea di azione indipendentemente dal fatto che si muova (detto molto grezzamente) a destra o a sinistra, in alto oppure in basso.
Il verso del vettore indica l’orientamento lungo la retta.
Ovvero se il vettore si muove da destra verso sinistra oppure da sinistra verso destra.
Equivalentemente possiamo dire dal basso verso l’alto, oppure dall’alto verso il basso.
Potremmo anche continuare con Nord e Sud, oppure con meno e più e così via.
Il verso è identificato graficamente da una freccia.
La terza componente importante dei vettori è il modulo o norma.
Il modulo o norma indica la lunghezza di questo vettore.
Questa caratteristica indica immediatamente qual è l’intensità di una forza o di una velocità (o di una qualsiasi grandezza vettoriale) e ne da una immediata percezione visiva.
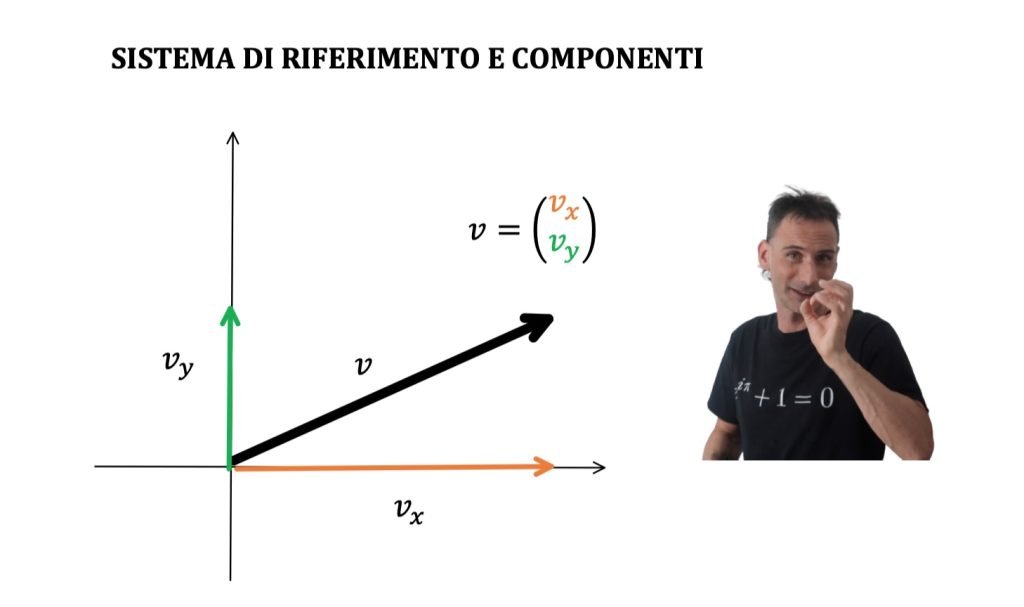
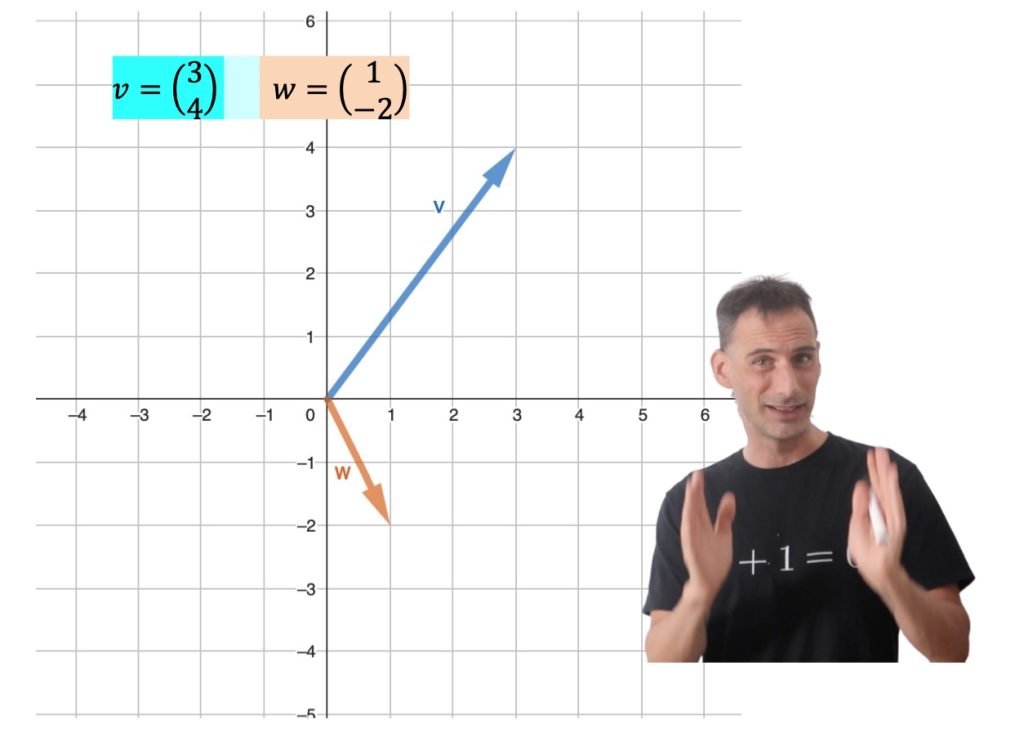
I VETTORI NEL PIANO CARTESIANO
Nel piano cartesiano ogni vettore con punto di partenza nell’origine può essere scomposto in due componenti: orizzontale e verticale:
In generale possiamo scriverlo così:
$$ v = \begin{pmatrix} v_x \\ v_y \end{pmatrix} $$

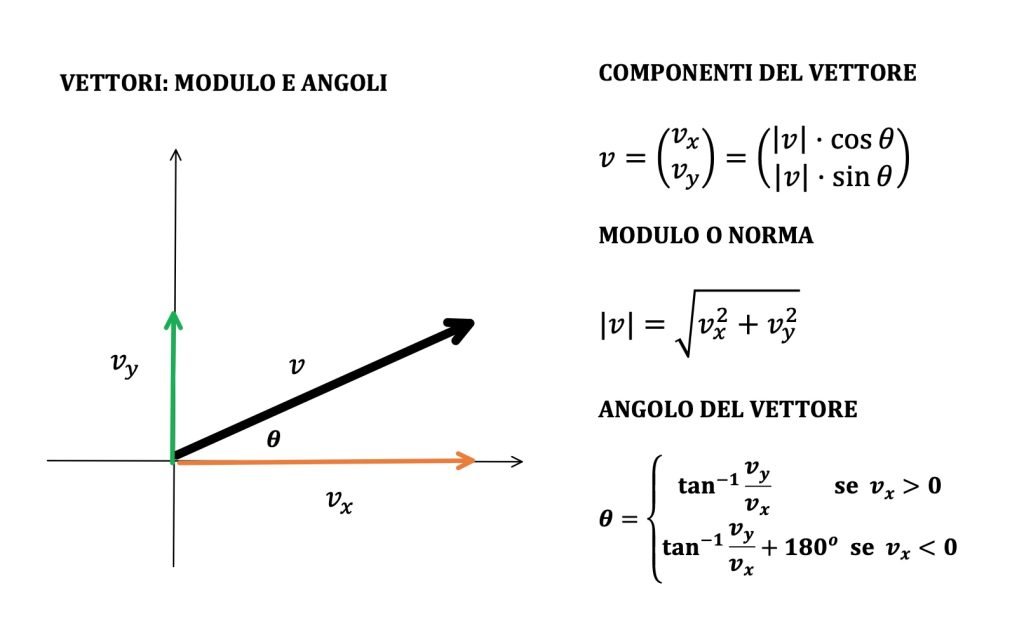
COMPONENTI, MODULO E ANGOLI DEL VETTORE
Per determinare le componenti dei vettori all’interno del sistema cartesiano ci avvaliamo del modulo e dell’angolo 𝜃 che il vettore forma rispetto all’asse orizzontale.
Il modulo o la norma del vettore (|v|) può essere calcolato mediante le stesse componenti orizzontale (vx) e verticale (vy)
In particolare la formula che utilizziamo è il teorema di Pitagora:
$$ |v| = \sqrt{v_x^2+v_y^2} $$
Dall’angolo 𝜃 che il vettore forma con l’asse orizzontale possiamo dterminare e dalla sua norma |v| possiamo determinare le due componenti:
$$ v = \begin{pmatrix} v_x\\v_y \end{pmatrix} = \begin{pmatrix} |v| \cdot \cos \theta \\ |v| \cdot \sin \theta \end{pmatrix} $$
Possiamo inoltre determinare le componenti del vettore sfruttando la formula della tangente dell’angolo 𝜃
Infatti sappiamo che per la stessa definizione la tangente di un angolo in un triangolo rettangolo è data dal rapporto tra il cateto opposto e quello adiacente:
$$ \tan \theta = \frac{v_y}{v_x} $$

Dunque applicando la formula inversa otteniamo che:
$$ \theta = \tan^{-1} \frac{v_y}{v_x} = \arctan \frac{v_y}{v_x} $$

Ricordiamo che la tangente di un angolo è definita nell’intervallo che va da -90 gradi a +90 gradi.
Pertanto quando la componente vx negativa dobbiamo aggiungere 180 gradi, dunque:
$$ \theta = \begin{cases} \tan^{-1} \frac{v_y}{v_x} + 180^o &\text{se}& v_x<0 \\ \tan^{-1} \frac{v_y}{v_x} &\text{se}& v_x>0 \end{cases} $$
COMPONENTI, MODULO E ANGOLI DEL VETTORE – ESEMPIO

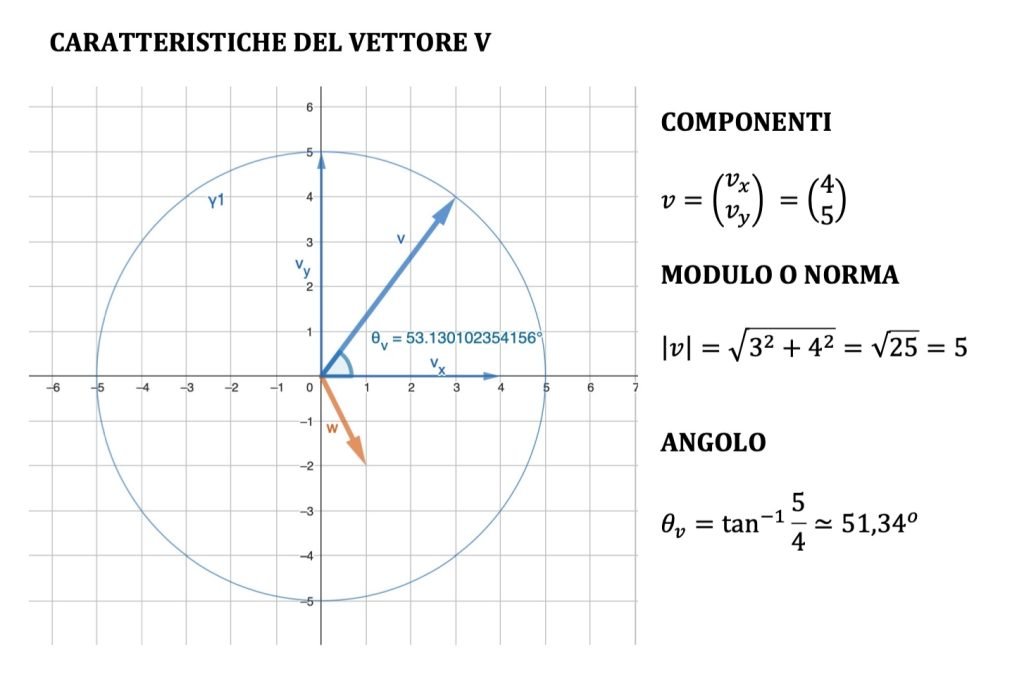
CARATTERISTICHE DEL VETTORE V
Cominciamo analizzando le caratteristiche del vettore v.
Le sue componenti vx e vy sono:
$$ v = \begin{pmatrix} v_x\\v_y \end{pmatrix} = \begin{pmatrix} 4\\5 \end{pmatrix} $$
Il suo modulo o la sua norma (lunghezza) è
$$ |v| = \sqrt{v_x^2 + v_y^2} = \sqrt{3^2+4^2} = 5 $$
L’angolo 𝜃v che forma rispetto all’orizzontale è:
$$ \theta_v = \tan^{-1} \frac{v_y}{v_x} = \tan^{-1} \frac{5}{4} \approx 51,34^o $$
Da notare che il vettore è il raggio di una circonferenza con centro nell’origine e raggio pari al modulo 5
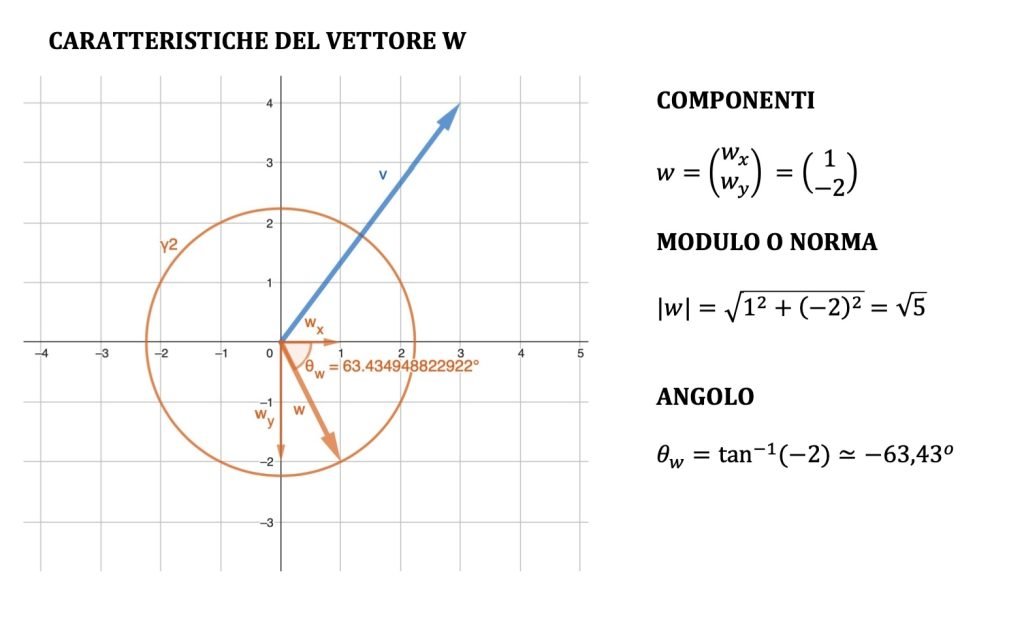
CARATTERISTICHE DEL VETTORE W
Analizziamo ora le caratteristiche del vettore w.
Le sue componenti vx e vy sono:
$$ w= \begin{pmatrix} w_x\\w_y \end{pmatrix} = \begin{pmatrix} 1\\-2 \end{pmatrix} $$
Il suo modulo o la sua norma (lunghezza) è
$$ |w| = \sqrt{w_x^2 + w_y^2} = \sqrt{1^2+(-2)^2} = \sqrt{5} $$
L’angolo 𝜃v che forma rispetto all’orizzontale è:
$$ \theta_w = \tan^{-1} \frac{w_y}{w_x} = \tan^{-1} (-2)\approx -63,43^o $$
Il vettore è il raggio di una circonferenza con centro nell’origine e raggio pari al modulo √5.
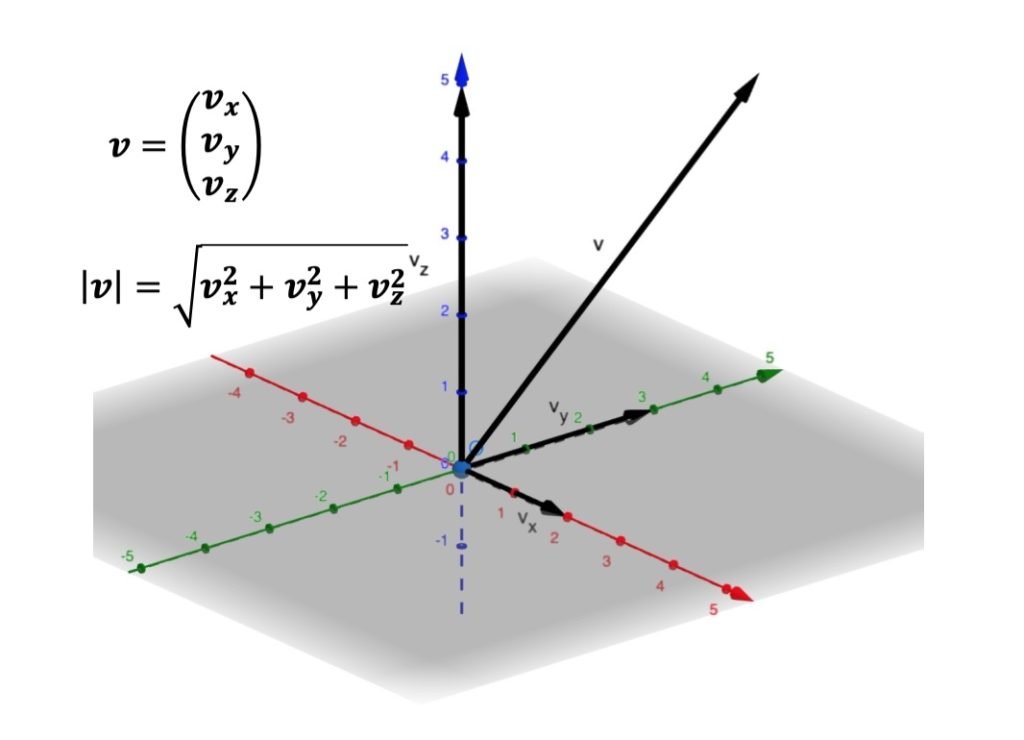
VETTORI NELLO SPAZIO
Quando un vettore si trova nello spazio si presenta con tre componenti rispetto ai tre assi di riferimento xyz.
Un generico vettore nello spazio si presenta nella forma:
$$ v= \begin{pmatrix} v_x\\v_y\\v_z \end{pmatrix} $$
La sua norma o modulo è data dalla formula di pitagora allargata alle tre dimensioni detta anche distanza euclidea
$$|v| = \sqrt{v_x^2+v_y^2+v_z^2} $$
Gli angoli che vengono presi a riferimento in questo caso sono due che possiamo chiamare 𝜃 e 𝜑
In particolare 𝜑 è l’angolo che si forma tra il vettore ed il piano xoy.
Mentre 𝜃 è l’angolo che si forma dal vettore proiezione del vettore sul piano xoy e l’asse delle x
Le tre componenti calcolate con questi angoli risultano:
$$ v= \begin{pmatrix} v_x\\v_y\\v_z \end{pmatrix} = \begin{pmatrix} |v| \cdot \cos \varphi \cdot \cos \theta \\ |v| \cdot \cos \varphi \cdot \sin \theta \\|v| \cdod \sin \theta \\ \end{pmatrix} $$

DEFINIZIONE MATEMATICA DI VETTORE
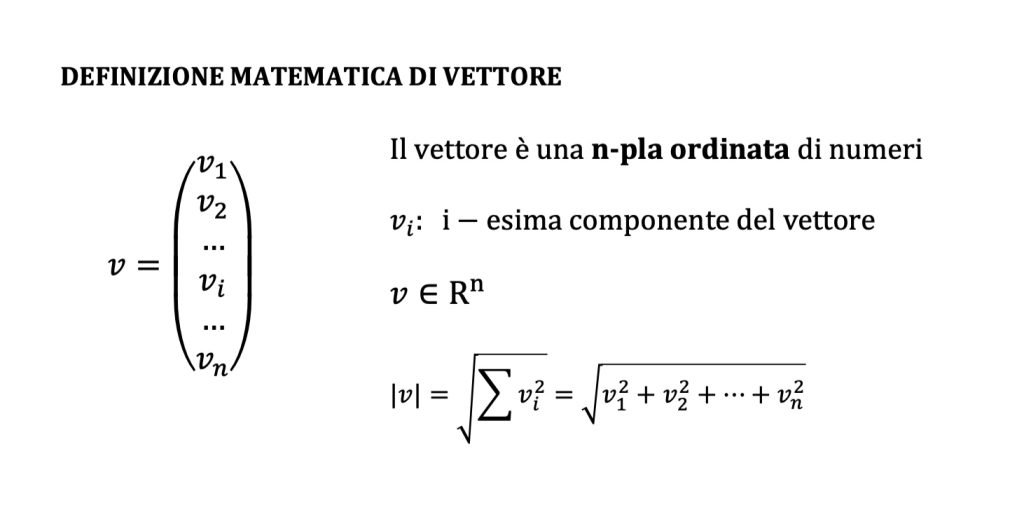
Il vettore inteso matematico è un oggetto che non ha più vincoli nello spazio e nel tempo.
Esso può essere inteso some una n-pla ordinata di numeri del tipo:
$$ v= \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} \in \mathbb{R^n} \\ \ \\ v_1, v_2, \dots , v_i, \dots , v_n\ \text{ sono le $n$ componenti del vettore} $$
Quando il vettore ha n componenti diciamo che il vettore appartiene allo spazio vettoriale Rn.
Quando le componenti del vettore sono maggiori di 3 diciamo che il vettore appartiene ad un iper-spazio.
La sua norma o modulo è la distanza euclidea dall’origine che altro non è che la radice quadrata della sommatoria dei quadrati delle componenti.
$$ |v| = \sqrt{v_1^2+v_2^2+ \cdots +v_n^2+} $$

Con una simbologia più sintetica possiamo anche scrivere:
$$ |v| = \sqrt{\sum v_i^2} $$
ANGOLO FORMATO DA DUE VETTORI
Per determinare l’angolo formato da due vettori v e w
$$ v= \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} \quad w= \begin{pmatrix} w_1 \\ w_2 \\ \cdots \\ w_i \\ \cdots \\ w_n \end{pmatrix} \in \mathbb{R^n}$$
usiamo la seguente formula:
$$ \theta = \cos^{-1} \frac{v \cdot w}{|v| \cdot |w|} \\ \ \\ \begin{array}{l} \text{$cos^{-1}$ è l’arcocoseno} \\ \text{$v \cdot w$ è il prodotto scalare dei vettori} \\ \text{$v \cdot w = \sum v_i \cdot w_i = v_1 \cdot w_1 + v_2 \cdot w_2 + \cdots + v_n \cdot w_n$ } \\ \text{$|v|, |w|$ sono i moduli dei due vettori } \end{array} $$
Per approfondire leggi l’articolo che riguarda il prodotto scalare.
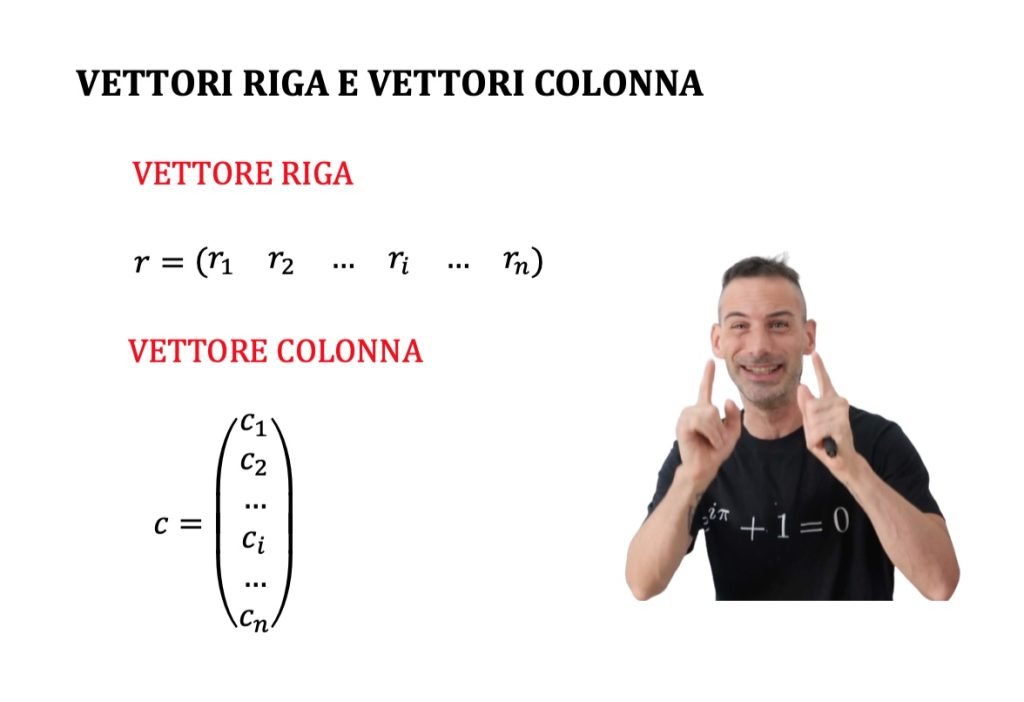
VETTORI RIGA E VETTORI COLONNA
Matematicamente i vettori possono essere scritti in riga oppure in colonnaa seconda dell’occorrenza.
I vettori riga sono vettori in cui le componenti sono scritti lungo una riga, ad esempio:
$$ r = \begin{pmatrix} r_1&r_2&\cdots &r_i& \cdots &r_n \end{pmatrix} $$
Mentre i vettori colonna sono vettori in cui le componenti sono scritte in colonna, ad esempio:
$$ c = \begin{pmatrix} c_1\\c_2\\ \cdots \\ c_i \\ \cdots \\ c_n \end{pmatrix} $$
IMPARA L’ALGEBRA LINEARE
Impara l’algebra lineare con un percorso strutturato e facile da seguire passo a passo.
Un viaggio che parte dai vettori e dalle matrici, passando per i sitemi lineari giungerai nei meandri degli spazi vettoriali, della diagonalizzazione delle matrici con tappa finale nelle coniche.
OPERAZIONI TRA VETTORI
Le operazioni che sono consentite nell’ambito dei vettori sono:
- somma e differenza
- moltiplicazione scalare – vettore
- combinazione lineare
- trasposizione
- prodotto scalare
- prodotto vettoriale (solo in R3)
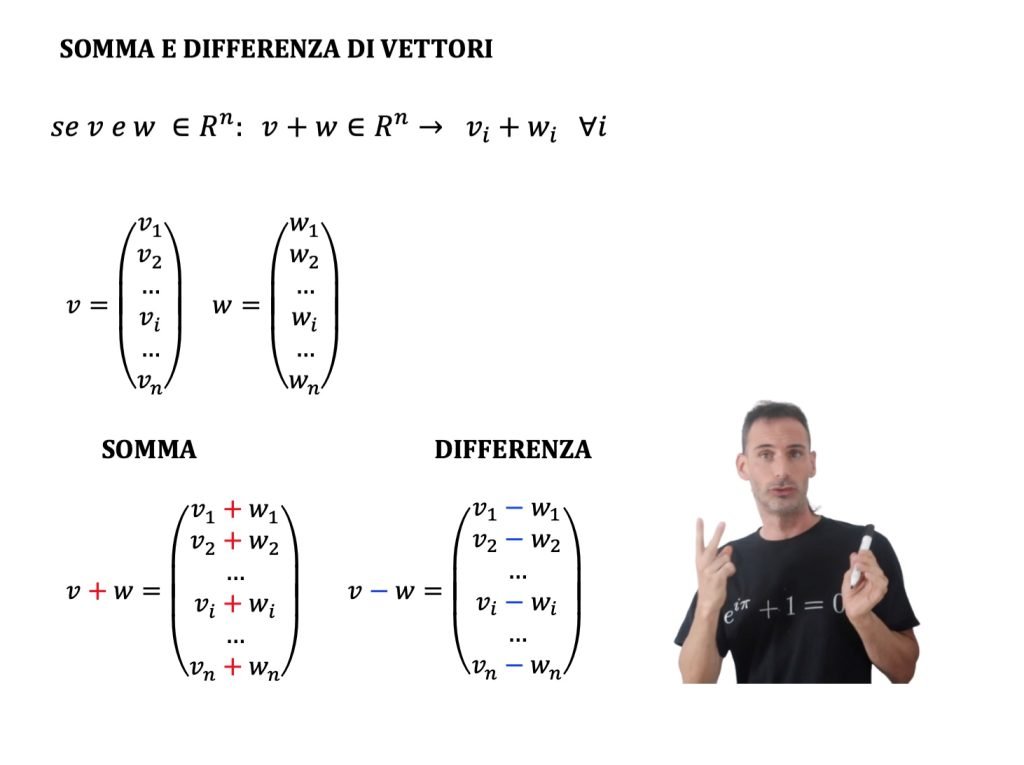
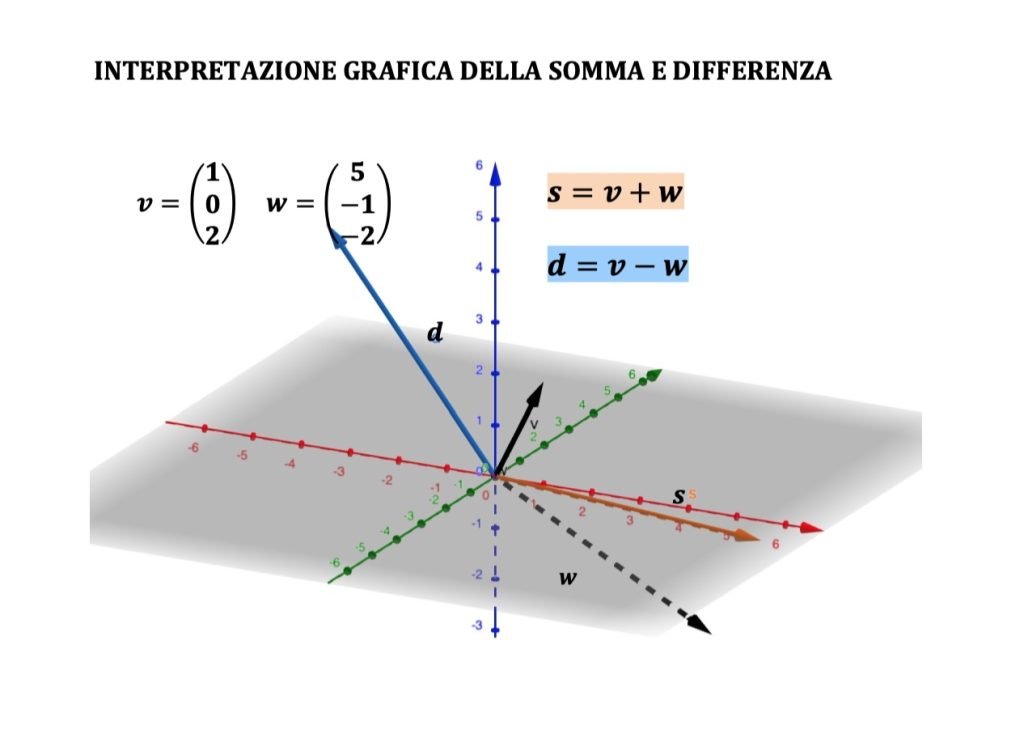
SOMMA E DIFFERENZA DI VETTORI
Consideriamo due generici vettore v e w dello spazio Rn (che hanno n componenti)
Fare la somma tra i due vettori significa sommare ogni loro i-esima componete.
Scritto in matematichese abbiamo che:
$$v,w \in \mathbb{R^n}: \quad v+w \in \mathbb{R^n} \to v_i+w_i \forall i $$
Detto in linguaggio più semplice consideriamo i due ttori scritti ad esempio in colonna:
$$ v= \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} \quad w= \begin{pmatrix} w_1 \\ w_2 \\ \cdots \\ w_i \\ \cdots \\ w_n \end{pmatrix} \in \mathbb{R^n}$$
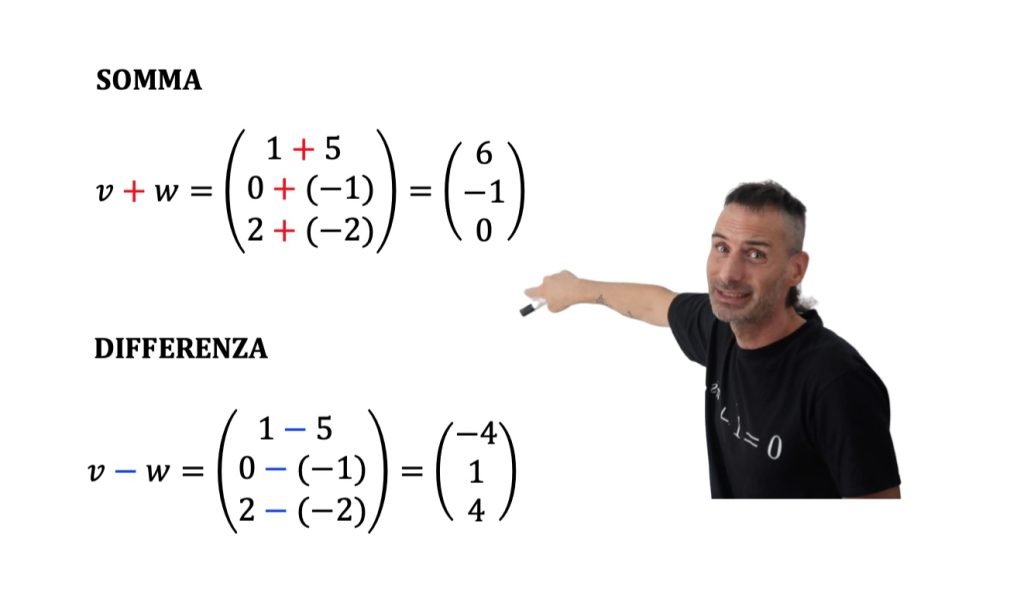
Allora scriviamo la loro somma v+w in questo modo:
$$ v \color{red}{+} w = \begin{pmatrix} v_1 \color{red}{+} w_1 \\ v_2 \color{red}{+} w_2 \\ \cdots \\ v_i \color{red}{+} w_i \\ \cdots \\ v_n \color{red}{+} w_n \end{pmatrix} $$
In modo analogo diciamo che la differenza v-w è data da:
$$ v \color{blue}{-} w = \begin{pmatrix} v_1 \color{blue}{-} w_1 \\ v_2 \color{blue}{-} w_2 \\ \cdots \\ v_i \color{blue}{-} w_i \\ \cdots \\ v_n \color{blue}{-} w_n \end{pmatrix} $$

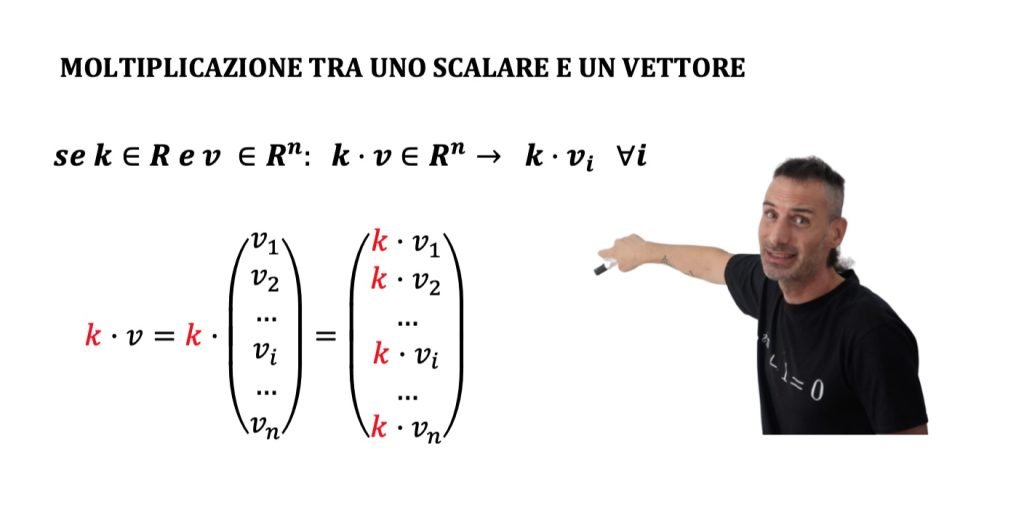
MOLTIPLICAZIONE TRA UNO SCALARE E UN VETTORE
Una seconda operazione molto semplice nell’ambito dei vettori è la moltiplicazione tra uno scalare e un vettore.
Uno scalare in genere è un numero k
Per moltiplicare uno scalare ad un vettore moltiplichiamo lo scalare per tutte le componenti del vettore
Scrivendo in linguaggio matematico:
$$ k \in \mathbb{R} \land v \in \mathbb{R^n} : \quad k \cdot v \in \mathbb{R} \to k \cdot v_i \forall i $$
In maniera più estesa scriviamo:
$$ \color{red}{k} \cdot v = \color{red}{k} \cdot \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} = \begin{pmatrix} \color{red}{k} \cdot v_1 \\ \color{red}{k} \cdot v_2 \\ \cdots \\ \color{red}{k} \cdot v_i \\ \cdots \\ \color{red}{k} \cdot v_n \end{pmatrix} $$
Il risultato di questa operazione è un multiplo o un sottomultiplo del vettore stesso
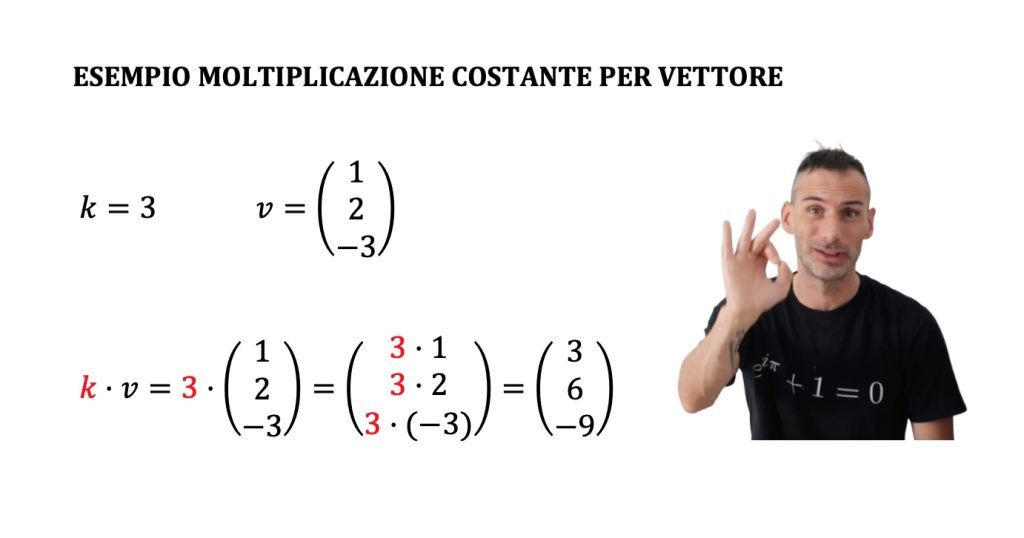
ESEMPIO MOLTIPLICAZIONE COSTANTE PER VETTORE
Consideriamo la seguente coppia di scalare-vettore:
$$ k= 3 \quad v = \begin{pmatrix} 1\\2\\-3 \end{pmatrix} $$
La moltiplicazione dello scalare per il vettore è:
$$ \color{red}{3} \cdot v = \color{red}{3} \cdot \begin{pmatrix} 1\\2\\-3 \end{pmatrix} = \begin{pmatrix} \color{red}{3} \cdot 1 \\ \color{red}{3} \cdot 2 \\ \color{red}{3} \cdot -3 \end{pmatrix} = \begin{pmatrix} 3\\6\\-9 \end{pmatrix} $$
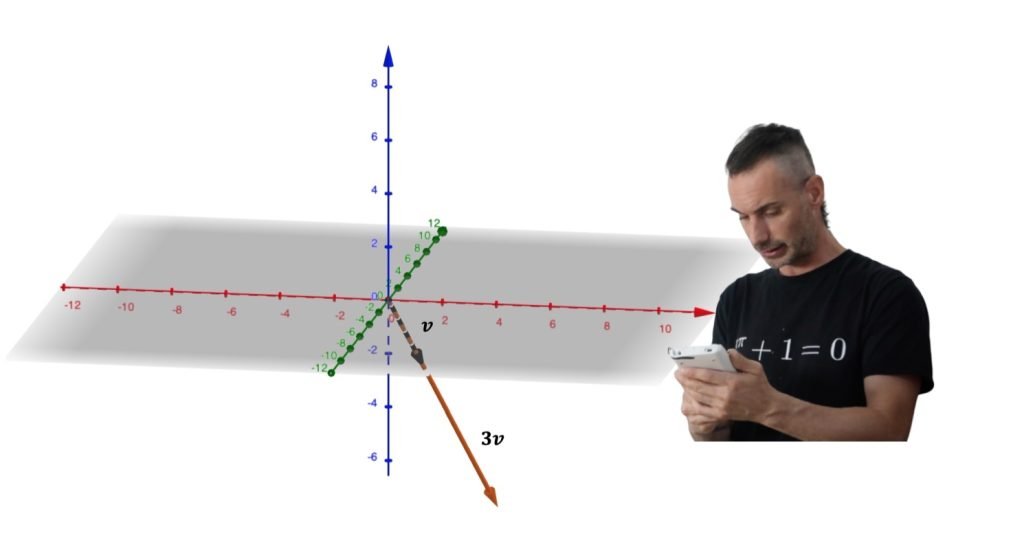
INTERPRETAZIONE GRAFICA
Quando ci troviamo in R2 o in R3 possiamo interpretare graficamentequesta operazione.
Riproduciamo dunque l’esempio appena visto
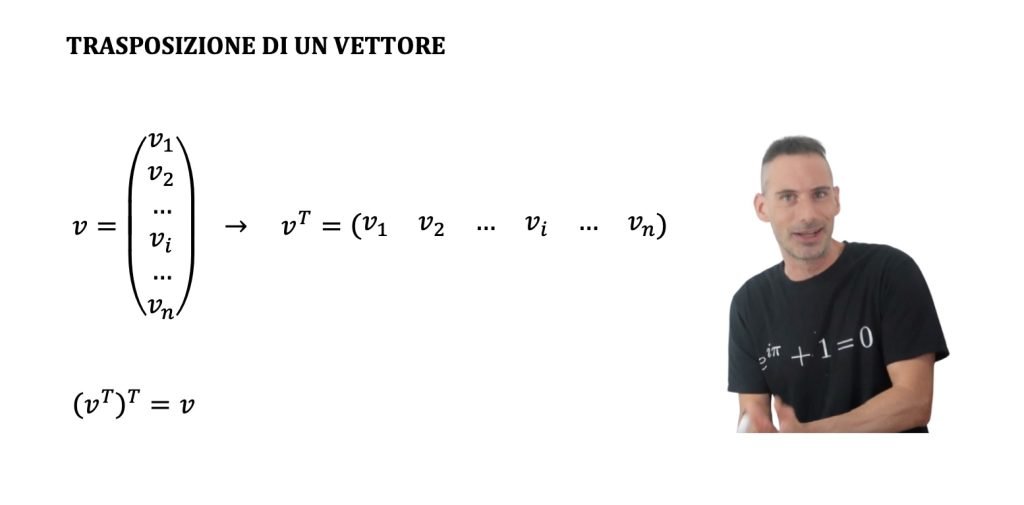
TRASPOSIZIONE DI UN VETTORE
L’operazione di trasposizione trasforma un vettore riga in un vettore colonna e viceversa.
Supponiamo di partire dal vettore v scritto in colonna:
$$ v= \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} $$
Applicando la trasposizione, otteniamo il vettore v trasposto, che diventa un vettore riga
$$ v^T= \begin{pmatrix} v_1 & v_2 & \cdots & v_i & \cdots & v_n \end{pmatrix} $$
Ovviamente la trasposizione della trasposizione riporta le cose come stavano in partenza.
Il vettore trasposto del vettore trasposto è il vettore stesso:
$$ (v^T)^T = v $$
PRODOTTO SCALARE E PRODOTTO VETTORIALE
Riportiamo di seguito le regole per il prodotto scalare e prodotto vettoriale:
Considerati due vettori v e w di n componenti, appartenenti dunque allo spazio vettoriale Rn:
$$ v= \begin{pmatrix} v_1 \\ v_2 \\ \cdots \\ v_i \\ \cdots \\ v_n \end{pmatrix} \quad w= \begin{pmatrix} w_1 \\ w_2 \\ \cdots \\ w_i \\ \cdots \\ w_n \end{pmatrix} \in \mathbb{R^n}$$
Il prodotto scalare v·w è dato dalla sommatoria dei prodotti tra le rispettive componenti i-esime:
$$ \large v \cdot w = \sum v_i \cdot w_i \\ \ \\ v \cdot w = v_1 \cdot w_1 + v_2 \cdot w_2 + \cdots + v_n \cdot w_n $$
L’operazione di prodotto vettoriale v×w è definita solamente nello spazio R3 (nello spazio tridimensionale).
Considerati dunque due generici vettori v e w di tre componenti:
$$ v = \begin{pmatrix} v_x\\v_y\\v_z \end{pmatrix} \quad w= \begin{pmatrix} w_x\\w_y\\w_z \end{pmatrix} $$
Definiamo prodotto vettoriale il vettore di R3 con le seguenti componenti:
$$ v \times w = v \land w = \begin{pmatrix} v_y \cdot w_z – v_z \cdot w \\ v_z \cdot w_x – v_x \cdot z \\ v_x \cdot w_y – v_y \cdot w_x \end{pmatrix} $$
Per approfondire il prodotto scalare e il prodotto vettoriale leggi il seguente articolo
HAI QUALCHE DOMANDA ?
Se questo articolo ti ha fatto venire qualche domanda scrivila nei commenti.
SCOPRI I SEGRETI DELL’ALGEBRA LINEARE
Impara l’algebra lineare con un percorso strutturato e facile da seguire passo a passo.
Un viaggio che parte dai vettori e dalle matrici, passando per i sitemi lineari giungerai nei meandri degli spazi vettoriali, della diagonalizzazione delle matrici con tappa finale nelle coniche.
L’ARTICOLO TI è PIACIUTO ?
Se questo contenuto ti è piaciuto e vorresti che anche altri utenti possano goderne di questo ed altri ancora sostieni il progetto offrendomi un semplice caffè virtuale
Questo semplice gesto per me significa moltissimo e può essere un forte impulso per lo sviluppo di tutto il progetto di divulgazione matematica
Visita il canale YouTube!