Le funzioni o applicazioni o trasformazioni lineari sono funzioni che mettono in relazione gli elementi di due spazio vettoriali V e W costruiti sopra un campo K
$$ f:\ V \to W $$
In questo articolo affronteremo solamente funzioni costruite sopra il campo dei numeri reali R
Tali applicazioni trasformano linearmente vettori v dello spazio vettoriale V in vettori w dello spazio vettoriale W che sono
$$ f(v) = w \quad \text{con}\ v \in V , w \in W $$
Con lo spazio vettoriale V di partenza intendiamo il dominio della funzione
Mentre con lo spazio vettoriale W intendiamo il codominio.
Trasformare linearmente significa rispettare due proprietà.
La prima proprietà dice che applicare la funzione lineare ad una somma di vettori equivale a fare la somma delle funzioni applicate sui vettori
$$ f(v_1+v_2) = f(v_1) + f(v_2) \quad v_1, v_2 \in V $$
Questo ovviamente può riguardare somme di tanti vettori:
$$ f \left( \sum v_i \right) = \sum f(v_i) $$
La seconda proprietà afferma che applicare una funzione ad un multiplo del vettore v (𝜆v) equivale a moltiplicare la costante 𝜆 per l’applicazione sul vettore v
$$ f( \lambda v ) = \lambda f(v) $$
Le due proprietà in questione possono essere riassunte con una sola.
Quando la funzione lineare viene applicata ad una combinazione lineare di vettori di V essa di trasforma in W come combinazione lineare con gli stessi coefficienti delle applicazioni calcolate sui singolo vettori
$$ f( \lambda_1 v_1 + \lambda_2 v_2 + \cdots+ \lambda_n v_n ) = \lambda_1 f(v_1)+ \lambda_2 f(v_2)+ \cdots+ \lambda_n f(v_n) $$
oppure in maniera più sintetica:
$$ f \left( sum \lambda_i v_i \right) = \sum \lambda_i f(v_i) $$
L’equazione di una funzione lineare è:
$$ \large w = f(v)= Av \\ \ \\ \text{$A$ è la matrice associata alla funzione lineare} \\ \text{$v$ è un vettore che appartiene allo spazio di partenza $V$} \\ \text{$w$ è l’immagine del vettore $v$ ed appartiene allo spazio $W$} $$
Questa equazione matriciale ricorda molto l’equazione della retta passante per il centro
$$ y = ax $$
La retta passante per il centro è infatti la più semplice funzione lineare che trasforma uno scalare (vettore con una dimensione) in uno scalare.
Sostituendo la y con la w e la x con la v abbiamo una forma ancora più simile.
$$ w = aw $$
È chiaro che ad una prima lettura di queste formule e proprietà si potrebbe fare un po’ di confusione.
Comunque non fatevi prendere dal panico perché andremo a spiegare ognuno di questi concetti singolo concetto in una sezione specifica con opportuni esempi.
INDICE
- 1 PICCOLA NOTA SULLA SIMBOLOGIA DELLE APPLICAZIONI LINEARI
- 2 LA RETTA È LA FUNZIONE LINEARE PIÙ SEMPLICE
- 3 ESEMPI PIÙ CLASSICI DI APPLICAZIONI LINEARI
- 4 LA MATRICE ASSOCIATA ALL’APPLICAZIONE LINEARE
- 5 PROPRIETÀ DI LINEARITA’ DELLE APPLICAZIONI LINEARI
- 6 COSTRUIRE LA MATRICE DELLE APPLICAZIONI LINEARI RISPETTO ALLE BASI CANONICHE
- 7 FUNZIONE LINEARE INVERSA E MATRICE INVERSA
- 8 ESEMPI DI FUNZIONI LINEARI INVERSE
- 9 CAMBIO DI BASE NELLE APPLICAZIONI LINEARI
- 10 ESEMPIO DI CAMBIO BASE NELLE APPLICAZIONI LINEARI
- 11 NUCLEO E IMMAGINE DI UNA APPLICAZIONE LINEARE
- 12 HAI QUALCHE DOMANDA ?
- 13 SCOPRI I SEGRETI DELL’ALGEBRA LINEARE
- 14 L’ARTICOLO TI è PIACIUTO ?
PICCOLA NOTA SULLA SIMBOLOGIA DELLE APPLICAZIONI LINEARI
Se vi capiterà di leggere articoli diversi oppure libri diversi sull’argomento delle applicazioni lineari vi garantisco che non troverete mai una simbologia uniforme.
Proprio perché questo è uno degli argomenti più elaborati della matematica.
Ad esempio per esprimere una funzione che va da uno spazio V ad uno spazio W potremmo avere:
$$ f:\ V \to W $$
Se lo spazio V è Rn ovvero contiene vettori con n componenti reali e lo spazio W è Rm e contiene m elementi reali potremo trovarci la scrittura:
$$ f:\ R^n \to R^m $$
oppure
$$ f:\ V= R^n \to W = R^m $$
oppure ancora
$$ f(v) =w \quad \text{con }\ v \in V = R^n , w \in W= R^m $$
Anche quando scriviamo funzioni lineari specialmente le più semplici possiamo usare le lettere x,y, z ad esempio:
$$ f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 2x-y+3z \\ x+3y-2z \end{pmatrix} $$
Se utilizziamo le lettere a,b,c diventerebbe:
$$ f \begin{pmatrix} a \\ b \\ c \end{pmatrix} = \begin{pmatrix} 2a-b+3c \\ a+3b-2c \end{pmatrix} $$
Quando invece (soprattutto per le funzioni con più incognite) usiamo la stessa lettera con i pedici possiamo avere:
$$ f \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} = \begin{cases} 2x_1-x_2+3x_3 \\ x_1+3x_2-2x_3 \end{cases} $$
Potremo anche osare esprimerla in questo modo:
$$ f \begin{pmatrix} w_1 \\ w_2 \end{pmatrix} = \begin{cases} 2v_1-v_2+3v_3 \\ v_1+3v_2-2v_3 \end{cases} $$
Ritornando alla scrittura di partenza in x,y, z
$$ f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{cases} 2x-y+3z \\ x+3y-2z \end{cases} $$
Potremmo anche riscriverla per vettori:
$$ f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = x \begin{pmatrix} 2 \\ 1 \end{pmatrix} + y \begin{pmatrix} -1 \\ 3 \end{pmatrix} +z \begin{pmatrix} 3 \\ -2 \end{pmatrix} $$
Ma anche utilizzando una tipica scrittura matriciale:
$$ f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix}2&-1&3\\ 1&3&-2 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \end{pmatrix} $$
Alcune volte vi capiterà di leggere una funzione lineare in modo sintetico come:
$$ w = Av $$
Dove V e lo spazio di partenza che contiene vettori v e W è lo spazio di arrivo che contiene vettori w.
Tale scrittura ricorda molto l’equazione della retta
$$ w= av $$
In altri contesti questa stessa funzione diventa:
$$ y= Ax $$
Dove X e lo spazio di partenza che contiene vettori x e Y è lo spazio di arrivo che contiene vettori y.
Ovviamente qui la retta che assomiglia di più è:
$$ y= ax $$
Se utilizziamo la nozione più scolastica e diffusa in Italia di retta che si impara alle scuole è:
$$ y = mx $$
Quindi un buon partner nella sua scrittura in forma di applicazione lineare è:
$$ y = Mx \quad \text{con }\ x \in X, y \in Y $$
Questo non voglio assolutamente scriverlo per complicarvi la situazione ma anzi per darvi un consiglio.
Specialmente all’inizio sceglietevi una vostra scrittura, quella con cui vi trovate meglio e cercate di riscrivere ogni testo secondo quella simbologia.
Poi gradualmente cercate di approcciare anche nuovi di vedere la materia perché vi assicuro in questa ricerca non arriverete mai ad un fine stabile, ma solo a stabili tappe sempre migliori.
LA RETTA È LA FUNZIONE LINEARE PIÙ SEMPLICE
La funzione o applicazione lineare più semplice è la retta che passa per l’origine
La sua forma più conosciuta è:
$$ y= mx \\ \ \\ \text{$m$ è il coefficiente angolare} $$
Questo è il più famoso esempio di funzioni ad una variabile reale, ovvero una funzione che va da R in R
$$ f:\ R \to R $$
Trasformiamola un attimo in:
$$ y = ax $$
Avvicinandoci di più alla scrittura vettoriale scriviamo:
$$ w = av $$
La sua rappresentazione grafica è:

Il coefficiente a identifica la pendenza ovvero il coefficiente angolare della retta.
Per ogni unità che ci spostiamo a destra sull’asse v ci muoviamo di a unità rispetto all’asse w
Questo significa che stiamo trasformando un generico elemento v che appartiene all’asse v in un suo multiplo av che si trova sull’asse w.
Credo che se siamo arrivati a questo punto della conoscenza matematica non vi sia bisogno di altri esempi se non quello di pensare alle rette:
$$ \begin{array}{l} y= x \to w=v & y= 2x \to w=2v & y= 3x \to w=3v \\ y= \frac{1}{2} x \to w= \frac{1}{2} v & y= \frac{1}{3} x \to w= \frac{1}{3} v & y= \frac{2}{5} x \to w= \frac{2}{5} v \end{array} $$
Nella generica retta
$$ w=av $$
Possiamo pensare al coefficiente a come ad un ponte di comunicazione tra la v e la w.
ESEMPI PIÙ CLASSICI DI APPLICAZIONI LINEARI
Consideriamo ora un esempio più classico di applicazioni o funzioni lineari.
Prendiamo la seguente applicazione che va da uno spazio V definito in R2 ad uno spazio W definito in R3:
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
Questa funzione trasforma vettori di R2 con due componenti in vettori di R3 con tre componenti
Ad esempio consideriamo i due vettori:
$$ v_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \quad v_2 = \begin{pmatrix} 3 \\ 2 \end{pmatrix} $$
Calcoliamo la funzione applicata al vettore v1:
$$ w_1= f(v_1) = f \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \begin{cases} 2\cdot 1 +0 \\ 1-0 \\ -1+3 \cdot 0 \end{cases} = \begin{pmatrix} 2 \\ 1 \\ -1 \cdot 0 \end{pmatrix} $$
Facciamo la stessa cosa con il vettore v2:
$$ w_2= f(v_2) = f \begin{pmatrix} 3 \\ 2 \end{pmatrix} = \begin{cases} 2\cdot 3 +2 \\ 3-2 \\ -3+3 \cdot 2 \end{cases} = \begin{pmatrix} 8 \\ 1 \\ 3 \cdot 0 \end{pmatrix} $$
Un primo modo per visualizzare la funzione è mettere separatamente i due spazi
V è rappresentato da un piano dove si trovano i vettori v1 e v2
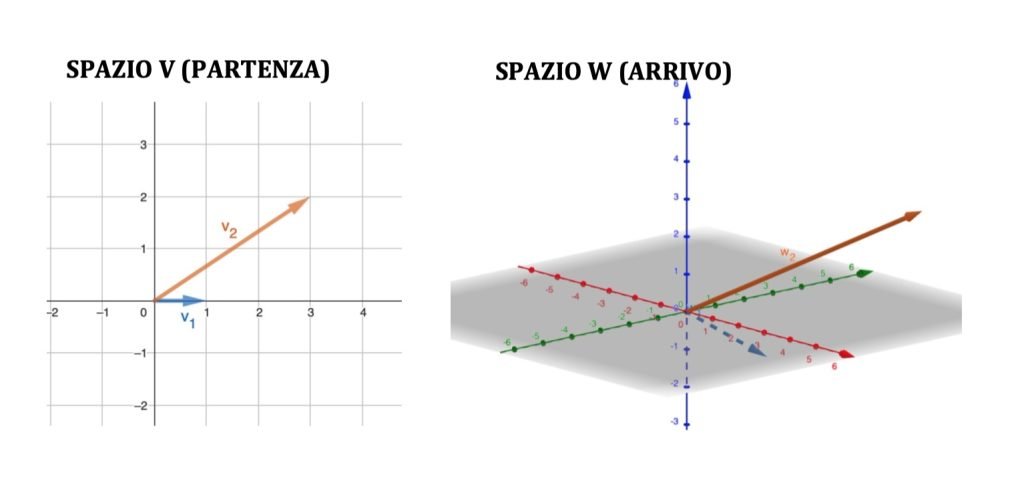
Mentre W è lo spazio tridimensionale dove si collocano i vettori immagine w1 e w2
Possiamo pensare che ogni volta che rappresentiamo un vettore v nello spazio V questo si trasformi mediante la funzione in un corrispondete vettore w nello spazio W.
LA MATRICE ASSOCIATA ALL’APPLICAZIONE LINEARE
Un altro modo per vedere l’applicazione o la funzione lineare:
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
è in una notazione tutta matriciale:
$$ f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 2&1 \\ 1&-1 \\ -1&3 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} $$
La matrice che viene applicata al vettore (x y) rappresenta la vera essenza della funzione lineare.
Una simbologia sintetica di questa scrittura è proprio:
$$ f(v) = Av $$
Oppure anche una scrittura che ricorda molto l’equazione di una retta:
$$ w= Av $$
In quest’ottica possiamo rappresentare la situazione in un sistema bidimensionale.
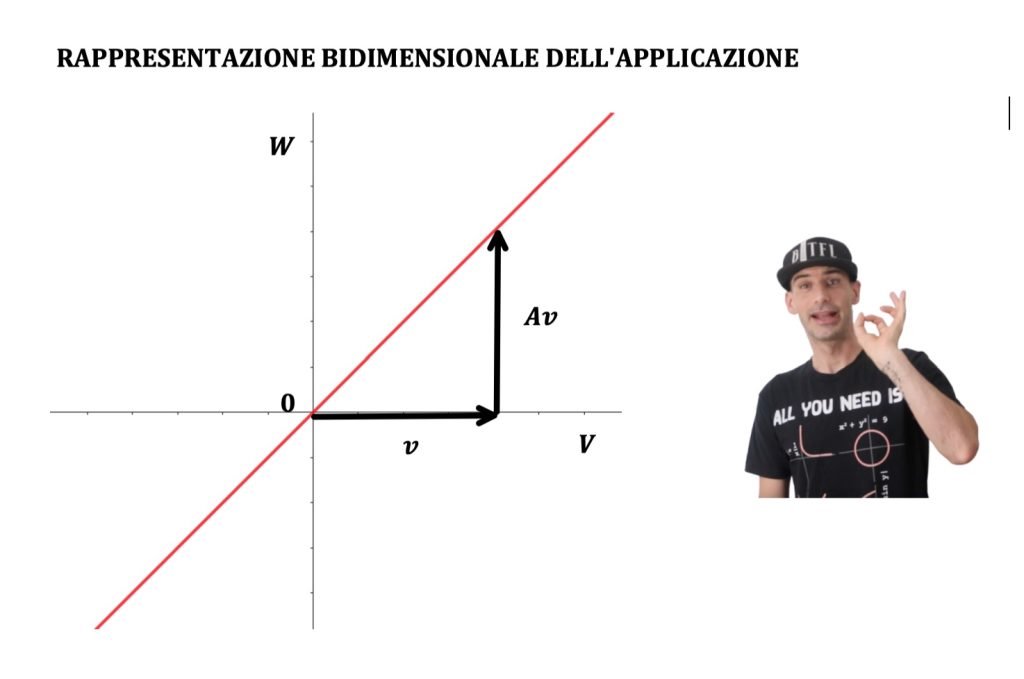
L’asse orizzontale rappresenta lo spazio vettoriale V mentre l’asse verticale lo spazio vettoriale W.
Se prendiamo un elemento v dello spazio V lo possiamo trasformare in un corrispondente elemento w=Av nello spazio vettoriale W.
Possiamo immaginare questa matrice A come un ponte di comunicazione tra i due spazi vettoriali.
Una sorta di filtro lineare che permette la trasformazione di vettori v dello spazio V in vettori w dello spazio W.
Prima di vedere come si costruisce la matrice A sfruttiamo il modello appena costruito per vedere le proprietà di linearità delle applicazioni lineari
PROPRIETÀ DI LINEARITA’ DELLE APPLICAZIONI LINEARI
Le applicazione lineari si distinguono da tutte le altre perché godono di due fondamenti proprietà che riguardano le operazioni di somma e di prodotto, riassunte dalle seguenti scritture sintetiche:
$$ \begin{array}{l} \text{proprietà della somma} &:& f(v_1+v_2)= f(v_1)+f(v_2) \\ \ \\ \text{proprietà del prodotto} &:& f(\lambda v)= \lambda f(v) \end{array} $$
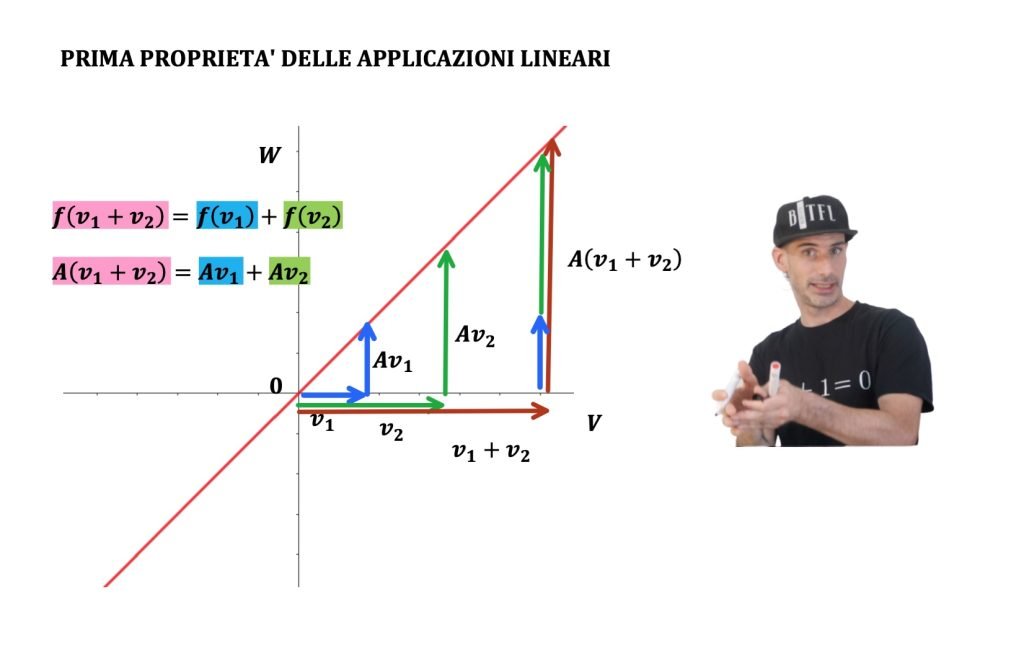
LA PROPRIETÀ DELLA SOMMA
La prima fondamentale proprietà delle applicazioni lineari riguarda l’operazione di somma.
Applicando la funzione lineare ad una somma di vettori si ottiene un risultato equivale a sommare le funzioni lineari applicate ai singoli vettori.
$$ \large f(v_1+v_2) = f(v_1) + f(v_2) $$
Nella funzione lineare vista sopra:
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
Abbiamo preso a riferimento 2 vettori:
$$ v_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \quad v_2 = \begin{pmatrix} 3 \\ 2 \end{pmatrix} $$
Poi abbiamo calcolato i valori della funzione applicata ai due vettori
$$ \begin{array}{l} w_1 &=& f(v_1) &=& f \begin{pmatrix} 1 \\ 0 \end{pmatrix} &=& \begin{pmatrix} 2 \\ 1 \\ -1 \end{pmatrix} \\ w_2 &=& f(v_2) &=& f \begin{pmatrix} 3 \\ 2 \end{pmatrix} &=& \begin{pmatrix} 8 \\ 1 \\ 3 \end{pmatrix} \end{array} $$
Proviamo a fare la somma di questi due valori e otteniamo:
$$ w_1+w_2 = f(v_1) + f(v_2) = \begin{pmatrix} 2 \\ 1 \\ -1 \end{pmatrix} + \begin{pmatrix} 8 \\ 1 \\ 3 \end{pmatrix} = \begin{pmatrix} 10 \\ 2 \\ 2 \end{pmatrix} $$
Proviamo ora a verificare il funzionamento di questa proprietà.
Calcoliamo dunque il vettore somma (v1+v2) :
$$ v_1+v_2= \begin{pmatrix} 1 \\ 0 \end{pmatrix} + \begin{pmatrix} 3 \\ 2 \end{pmatrix} = \begin{pmatrix} 4 \\ 2 \end{pmatrix} $$
Applichiamo quindi la funzione lineare a questo vettore ottenendo lo stesso risultato:
$$ f(v_1+v_2) = f \begin{pmatrix} 4 \\ 2 \end{pmatrix} = \begin{pmatrix} 2 \cdot 4 +2 \\ 4-2 \\ -4+3 \cdot 2 \end{pmatrix} = \begin{pmatrix} 10 \\ 2 \\ 2 \end{pmatrix} $$
Abbiamo dunque verificato la proprietà che:
$$ f(v_1+v_2) = f(v_1) + f(v_2) = \begin{pmatrix} 10 \\ 2 \\ 2 \end{pmatrix} $$
Scritta in modo matriciale questa può diventare:
$$ A(v_1+v_2) = Av_1 + Av_2 $$
Questo dal momento che la matrice A stessa rappresenta la stessa funzione lineare.
Sfruttiamo ora il modello bidimensionale per capirla un po’ meglio dal punto di vista visivo
LA PROPRIETÀ DEL PRODOTTO
La seconda proprietà che devono soddisfare le applicazioni lineari riguarda la moltiplicazione tra uno scalare e un vettore.
Applicare una funzione lineare ad uno scalare per un vettore (𝜆v) equivale a moltiplicare lo scalare per la funzione applicata al vettore.
$$ \large f(\lambda v)= \lambda f(v) $$
Ritorniamo ancora all’esempio della funzione lineare:
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
Prendiamo a riferimento il vettore v1 e il suo doppio 2v1:
$$ v_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \quad 2v_1 = \begin{pmatrix} 2 \\ 0 \end{pmatrix} $$
Il valore della funzione in v1 lo abbiamo già calcolato:
$$ f(v_1)= f \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \begin{pmatrix} 2 \\ 1 \\ -1 \end{pmatrix} $$
Il doppio di questo vettore è:
$$2f(v_1)= 2 \cdot \begin{pmatrix} 1 \\ 0 \end{pmatrix} = 2 \begin{pmatrix} 2 \\ 1 \\ -1 \end{pmatrix} = \begin{pmatrix} 4 \\ 2 \\ -2 \end{pmatrix} $$
Applichiamo ora la funzione lineare al doppio del vettore
$$ f(2v_1)= f \begin{pmatrix} 1 \\ 0 \end{pmatrix}= \begin{pmatrix} 2 \cdot 2 \\ 2-0 \\ -2+3 \cdot 0 \end{pmatrix} = \begin{pmatrix} 4 \\ 2 \\ -2 \end{pmatrix} $$
Ecco che abbiamo dimostrato che:
$$ f( \lambda v) = \lambda f(v) $$
che possiamo scrivere anche in questo modo
$$ A ( \lambda v) = \lambda A v $$
Utilizziamo ancora una volta il nostro modello lineare per spiegare meglio questo concetto

Applicando 𝜆 volte l’applicazione A sul vettore v si ottiene un risultato equivalente che applicare la funzione A sul vettore 𝜆v
COSTRUIRE LA MATRICE DELLE APPLICAZIONI LINEARI RISPETTO ALLE BASI CANONICHE
Finora abbiamo considerato in modo molto semplice la matrice A associata all’applicazione lineare.
In particolare osserviamo ancora una volta la funzione analizzata più volte sopra.
Tale applicazione trasforma vettori con due componenti dello spazio V in vettori con tre componenti dello spazio W
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
In una notazione matriciale del tipo:
$$ f(v) = Av $$
L’abbiamo semplicemente riscritta nel seguente modo:
$$ f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 2&1 \\ 1&-1 \\ -1&3 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} $$
Osserviamo ora attentamente la matrice A associata a tale funzione:
$$ A = \begin{pmatrix} 2&1 \\ 1&-1 \\ -1&3 \end{pmatrix} $$
Sulla prima colonna abbiamo semplicemente riportato i coefficienti associati alla x che è la prima componente del vettore dello spazio V=R2 di partenza
Mentre sulla seconda colonna abbiamo scritto i coefficienti relativi alla seconda componente del vettore generico v di V.
Dopo tutto come vedremo la cosa non è così sbagliata anche se vanno specificate alcune premesse.
In primo luogo le applicazioni lineari trasforma vettori v di uno spazio vettoriale V di partenza in vettori w dello spazio vettoriale di arrivo W.
$$ f:\ V \to W \quad , \quad f(v)= w $$
Avendo a che fare con spazi vettoriali dobbiamo indicare le basi di questi spazi vettoriali.
TEOREMA DELL’UNICITÀ DELLA MATRICE ASSOCIATA AD UNA FUNZIONE
Un teorema molto importante in algebra lineare afferma che data una funzione lineare esiste un’unica matrice associata ad una certa base del dominio e una certa base del codominio
Nel caso specifico della funzione in esame
$$ f:\ V=R^2 \to V=R^3 : \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{cases} 2x+y \\ x-y \\ -x+3y \end{cases} $$
abbiamo a che fare con una funzione che trasforma vettori di R2 (spazio V di partenza o dominio ) in vettori di R3 (spazio W finale o codominio ).
Possiamo quindi considerare come basi semplici le basi canoniche di questi spazio vettoriali che chiamiamo I2 e I3.
$$ \begin{array}{l} B_V = R^2 &\to& I_2 = \left\{ \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 1 \end{pmatrix} \right\} = \{ e_1, e_2 \} \\ B_W = R^3 &\to& I_3 = \left\{ \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}, \begin{pmatrix} 0 \\ 1 \\0 \end{pmatrix} , \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \right\} = \{ e_1, e_2 , e_3 \} \end{array} $$
A questo punto applichiamo la funzione lineare su due vettori della base canonica di R2 che è base del dominio V:
$$ \begin{array}{l} f(e_1) = f \begin{pmatrix} 1 \\ 0 \end{pmatrix} &=& \begin{pmatrix} 2 \cdot 1+0 \\ 1-0 \\ -1+3 \cdot 0 \end{pmatrix} &=& \begin{pmatrix} 2 \\ 1 \\0 \end{pmatrix} \\ f \begin{pmatrix} 0 \\ 1 \end{pmatrix} &=& \begin{pmatrix} 2 \cdot 0+1 \\ 0-1 \\ -0+3 \cdot 1 \end{pmatrix} &=& \begin{pmatrix} 1 \\ -1 \\ 3 \end{pmatrix} \end{array} $$
Questi due vettori di W coincidono proprio con le colonne della nostra funzione!
“Tutto qui ?” Mi direte
In realtà c’è ancora un passaggio logico importante da fare, ovvero quello di esprimere questi due vettori dello spazio W=R3 rispetto alla loro base canonica:
$$ \begin{array}{l} w_1 = f(e_1) = \begin{pmatrix} 2 \\ 1 \\0 \end{pmatrix} &=& 2 \begin{pmatrix} 1 \\ 0 \\0 \end{pmatrix} + 1 \begin{pmatrix} 0 \\ 1 \\0 \end{pmatrix} + 0 \begin{pmatrix} 0 \\ 0 \\1 \end{pmatrix} &=& 2e_1 +e_2+0e_3 \\ w_2 = f(e_2) = \begin{pmatrix} 1 \\ -1 \\ 3 \end{pmatrix} &=& 1 \begin{pmatrix} 1 \\ 0 \\0 \end{pmatrix} – 1 \begin{pmatrix} 0 \\ 1 \\0 \end{pmatrix} + 3 \begin{pmatrix} 0 \\ 0 \\1 \end{pmatrix} &=& e_1 -e_2+3e_3 \end{array} $$
Le colonne della matrice A indicano perciò le coordinate dei vettori w=f(v) di arrivo rispetto alla base canonica dei dominio e alla base canonica del codominio.
A partire dalla forma semplificata dell’inizio:
$$ Av = w $$
Il calcolo matriciale che abbiamo fatto è il seguente:
$$ \large A(Iv) = I w $$
Dove :
$$ \text{$I$ è la matrice della base canonica}
(che deve essere ponderata sulla dimensione dello spazio di riferimento)
$$ \text{$v,w$ sono i vettori delle coordinate dei vettori $v,w$ rispetto alla base canonica}
(ovviamente i vettori e le coordinate coincidono quando la base è canonica)
Moltiplicando a sinistra entrambi i termini per l’inversa della matrice I associata al codominio otteniamo la nostra matrice della funzione:
$$ \color{red}{I^{-1}} A (Iv) = \color{red}{I^{-1}} Iw \to \left( I^{-1} AI \right)v = w \\ \ \\ \begin{array}{l} I^{-1} & \text{ è la matrice inversa della base del codominio} \\ I & \text{è la matrice della base del dominio} \end{array} $$
Essendo che l’inversa della matrice I è ancora I quello che ci resta è la matrice A associata alla base canonica del dominio e a quella canonica del codominio.
Questa è proprio la versione semplificata che abbiamo presentato all’inizio.
La cosa risulta sempre così semplice?
In realtà no perché i problemi cominciano quando cambiamo le basi del dominio e del codominio.
Prima di affrontare questa questione vediamo un breve assaggio di cosa significa funzione inversa.
FUNZIONE LINEARE INVERSA E MATRICE INVERSA
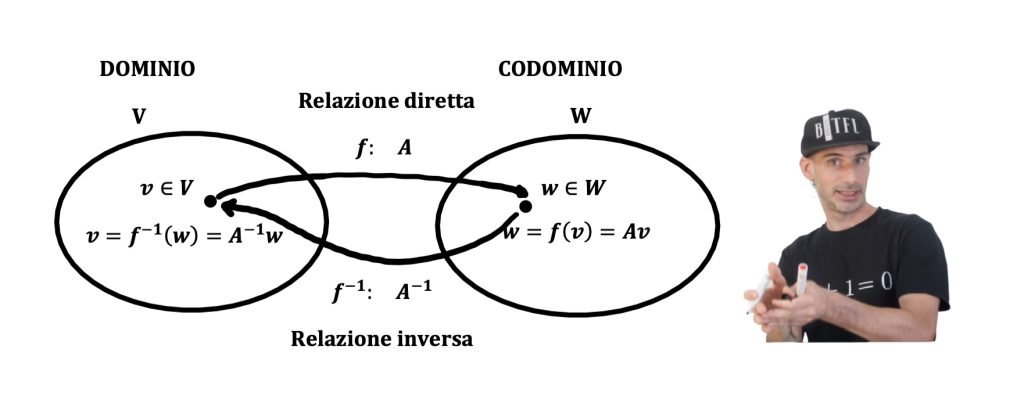
Data una applicazione lineare che collega uno spazio V (dominio) ad uno spazio W(codominio)
$$ f:\ V \to W ,\ w= Av $$
Tale funzione f trasforma linearmente dei vettori v di V in vettori w di W
Definiamo f-1 la relazione inversa (funzione o applicazione inversa) che permette di trasformare i corrispondenti vettori immagine w di V nei vettori di partenza
$$ f^{-1}:\ W \to V ,\ v= A^{-1}w $$
Sfruttando questa relazione inversa il passaggio finale consiste nello scambiare ancora v con w
$$ f^{-1}:\ W \to V ,\ v= A^{-1}w \overset{\begin{array}{l} V \leftrightarrow W \\ v \leftrightarrow w \end{array}}{\longrightarrow} f^{-1}:\ V \to W ,\ w= A^{-1}v$$
La visione di questo grafico semplificherà un po’ la comprensione
La procedura matematica con le matrici per arrivare alla funzione inversa consiste semplicemente nel moltiplicare a sinistra per la matrice inversa della funzione lineare:
$$ w= AV \to \color{red}{A^{-1}} w= \color{red}{A^{-1}} Av \to A^{-1}w= Iv \to v= A^{-1} w $$
Infine si scambia la v con la w:
$$ w= A^{-1}v $$
Ovviamente per poter calcolare la funzione inversa di una applicazione lineare dobbiamo verificare che questa risulti invertibile.
Una applicazione lineare è invertibile se risulta sia iniettiva che suriettiva.
In questo articolo non vogliamo addentrarci nella questione che affrontiamo nell’articolo dedicato al nucleo e l’immagine di una funzione lineare.
Comunque dobbiamo sapere che la funzione è certamente invertibile la matrice A è quadrata e ha determinante diverso da zero:
$$ A \in M[n \times n] \land \det A \ne 0 \to w=Av \quad \text{è invertibile} $$
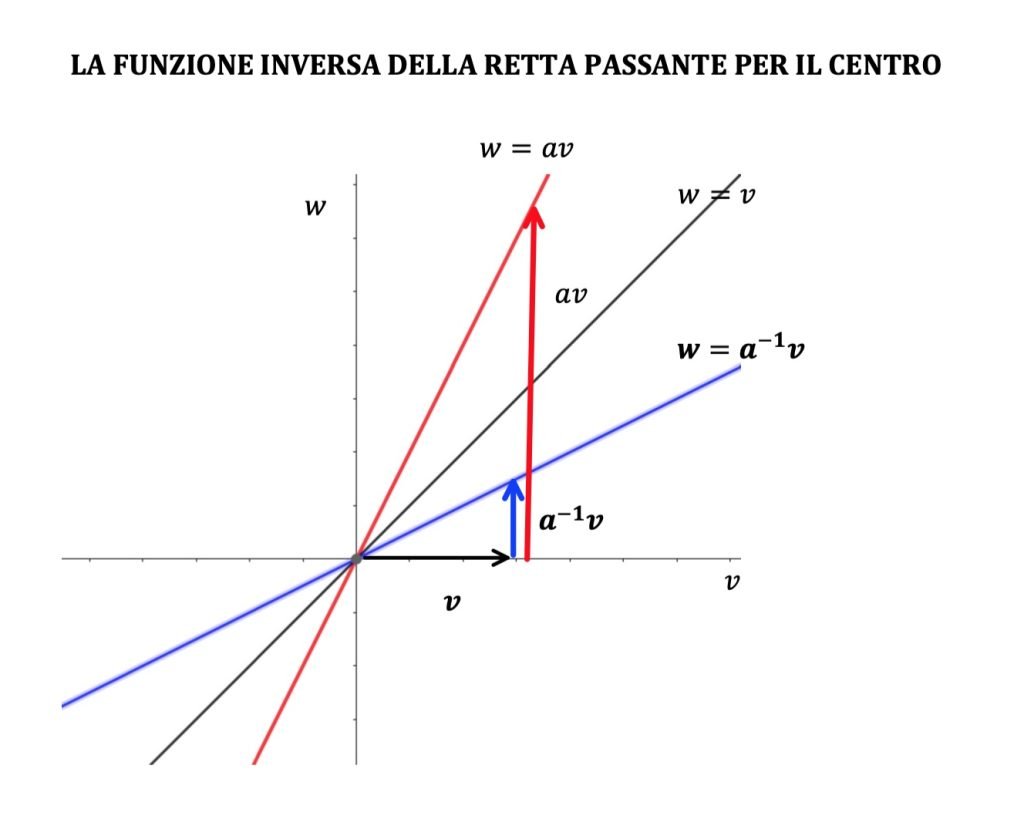
LA FUNZIONE INVERSA DELLA RETTA PASSANTE PER IL CENTRO
La retta passante per il centro è l’applicazione lineare più semplice e la sua forma è:
$$ y=ax $$
che possiamo riscrivere come:
$$ w = av $$
Dividendo per ambo i membri otteniamo la relazione inversa:
$$ v = \frac{1}{a} w $$
Scambiando la v con la w otteniamo la retta inversa che ha come pendenza il reciproco della retta di partenza:
$$ w= \frac{1}{a} v $$
che possiamo anche riscrivere come:
$$ w = a^{-1} v $$
Dal punto di vista grafico questa nuova retta passante per il centro risulta simmetrica alla bisettrice del primo e del terzo quadrante
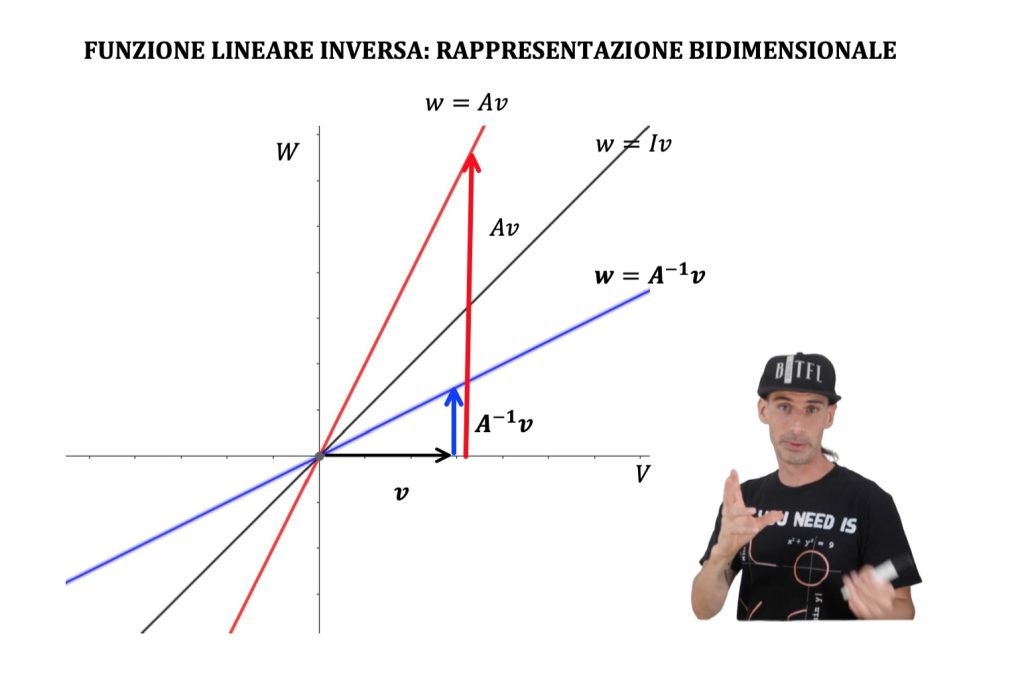
Possiamo trasmettere questa visione anche quando in gioco ci sono applicazioni lineari che mandano vettori v di V in vettori w di W
IMPARA L’ALGEBRA LINEARE
Impara l’algebra lineare con un percorso strutturato e facile da seguire passo a passo.
Un viaggio che parte dai vettori e dalle matrici, passando per i sitemi lineari giungerai nei meandri degli spazi vettoriali, della diagonalizzazione delle matrici con tappa finale nelle coniche.
ESEMPI DI FUNZIONI LINEARI INVERSE
Consideriamo alcuni esempi di applicazioni lineari che ammettono la funzione inversa
ESEMPIO 1
Partiamo con la seguente applicazione lineare che va da R2 a R2
$$ f:\ R^2 \to R^2 \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} x+3y \\ x-2y \end{pmatrix} $$
La sua scrittura matriciale rispetto alle basi canoniche è:
$$ f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} $$
La matrice A associata alla funzione lineare è:
$$ A = \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} $$
Il determinante di A è diverso da zero, infatti:
$$ \det A = \left| \begin{array}{c} 1&3 \\ 1&-2 \end{array} \right| = -2+3= 1 $$
La matrice è invertibile e la sua matrice inversa A-1 è
$$ A^{-1} = \begin{pmatrix} -2&-3 \\ -1&1 \end{pmatrix} $$
Dunque la funzione inversa è:
$$ f^{-1} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} -2&-3 \\ -1&1 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} $$
che possiamo anche riscrivere nel modo più classico:
$$ f^{-1} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} -2x-3y \\ -x+y \end{pmatrix} $$
ESEMPIO 2
Consideriamo anche un esempio di funzione che va da R3 a R3
$$ f:\ R^3 \to R^3 \quad f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} x+2z \\ x-y-z \\2y \end{pmatrix} $$
Scriviamo la matrice in termini matriciali:
$$ f \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 1&0&2 \\ 1&-1&-1 \\ 0&2&0 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \end{pmatrix} $$
La matrice A associata alla funzione lineare è:
$$ A = \begin{pmatrix} 1&0&2 \\ 1&-1&-1 \\ 0&2&0 \end{pmatrix} $$
Anche in questo caso il determinante di A è diverso da zero dunque la funzione risulta invertibile:
$$ \det A = \left| \begin{array}{c} 1&0&2 \\ 1&-1&-1 \\ 0&2&0 \end{array} \right| = 6 \ne 0 $$
La funzione inversa risulta dunque:
$$ f^{-1} \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 1&0&2 \\ 1&-1&-1 \\ 0&2&0 \end{pmatrix}^{-1} \begin{pmatrix} x \\ y \end{pmatrix} \\ f^{-1} \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} \frac{1}{3} & \frac{2}{3} & \frac{1}{3} \\ 0&0& \frac{1}{2} \\ \frac{1}{3} & -\frac{1}{3} & -\frac{1}{6} \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} $$
che possiamo riscrivere nella forma più classica:
$$ f^{-1} \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} \frac{1}{3} x+ \frac{2}{3} y + \frac{1}{3} z \\ \frac{1}{2} z \\ \frac{1}{3} x- \frac{1}{3} y – \frac{1}{6} z \end{pmatrix} $$
CAMBIO DI BASE NELLE APPLICAZIONI LINEARI
Abbiamo visto sopra come determinare la matrice A rispetto alla base canonica del dominio e del codominio.
Ora vediamo come determinare la matrice A’ associata ad una nuova base del dominio ed una nuova base del codominio.
Partendo dall’equazione matriciale dell’applicazione lineare:
$$ \large w= Av \\ \ \\ \begin{array}{l} \text{$w$ è il vettore scritto rispetto alla base canonica del codominio} \\ \text{$v$ è il vettore scritto rispetto alla base canonica del dominio} \\ \text{$A$ è la matrice della funzione rispetto alle basi canoniche} \end{array} $$
Possiamo scrivere la stessa applicazione lineare rispetto ad una nuova base del dominio D’ e una nuova base del codominio C’ in questo modo:
$$ \large w’= C’^{-1} A v’ \\ \ \\ \begin{array}{l} \text{$w’$ è il vettore scritto rispetto alla base $C’$ del codominio} \\ \text{$v’$ è il vettore scritto rispetto alla base $D’$ del dominio} \\ \text{$A$ è la matrice della funzione rispetto alle basi canoniche} \\ \text{$D’$ è la nuova base del dominio } \\ \text{$C’$ è la nuova base del codominio } \end{array} $$
Per comprendere meglio questi passaggi affrontiamo la questione in questi 4 semplici punti:
- Consideriamo nelle rette la bisettrice del primo e del terzo quadrante
- Effettuiamo un semplice cambio di base
- Generalizziamo il cambio di base per la retta
- Generalizziamo il cambio di base negli spazi vettoriale
1 – CONSIDERIAMO LA BISETTRICE DEL PRIMO E DEL TERZO QUADRANTE
Cominciamo con il considerare la bisettrice del primo e del terzo quadrante:
$$ y=x $
che riscriviamo con la scrittura più familiare:
$$ w=v $$
Possiamo considerare come base sia di v che di w una unità u=1di un certo sistema di riferimento

2 – EFFETTUIAMO UN SEMPLICE CAMBIO DI BASE
Adesso effettuiamo un semplice cambio di base sia per l’asse delle v che per l’asse di w.
In particolare assumiamo che una nuova unità base u’=2 sull’asse delle v corrisponda a 2 unità u=1 della precedente base:
In questo modo deve valere la relazione:
$$ v=2v’ $$
il che significa che se vogliamo esprimere il numero di unità v su cui ci stiamo spostando sull’asse delle v dobbiamo moltiplicare per 2 il numero di unità v’ quando ci spostiamo sull’asse v’.
Ad esempio se viaggiamo su 2 unità sul sistema v’ significa che stiamo viaggiando di 4 unità sul sistema di origine v
Allo stesso modo creiamo una nuova unità u”=3 sull’asse delle w tale che questa unità corrisponda a 3 unità base sull’asse delle w.
In questo modo vale la relazione:
$$ w = 3w’ $$
il che significa che se vogliamo esprimere il numero di unità w su cui ci stiamo spostando sull’asse delle v dobbiamo moltiplicare per 3 il numero di unità w’ quando ci spostiamo sull’asse v’.
Ad esempio se ci muoviamo di 2 unità in alto sul sistema w’ significa che ci muoviamo sul sistema v di 6 unità
Vederlo sul grafico è molto più semplice che a spiegarlo:
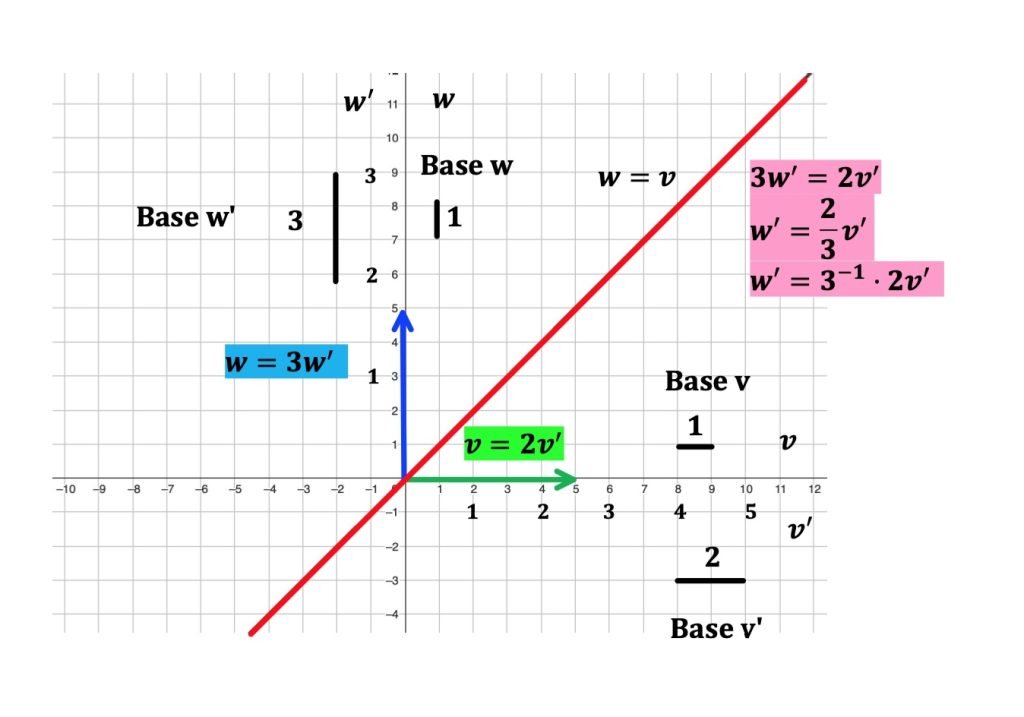
Se partiamo dall’equazione di partenza rispetto al sistema canonico:
$$ w=v $$
e sostituiamo le nuove relazioni tra il nuovo e il il vecchio sistema
$$ v=2v’ \quad w=3w’ $$
troviamo l’equazione rispetto al nuovo sistema di riferimento:
$$ w=v \overset{\begin{cases} v=2v’ \\ w=3w’ \end{cases} }{\longrightarrow} 3w’= 2v’ $$
Esplicitiamo quindi il vettore w’
$$ w’= \frac{2}{3} v’ $$
Per avvicinarci di più al linguaggio delle matrici possiamo anche scrivere:
$$ w’ = 3^{-1} \cdot 2 v’ $$
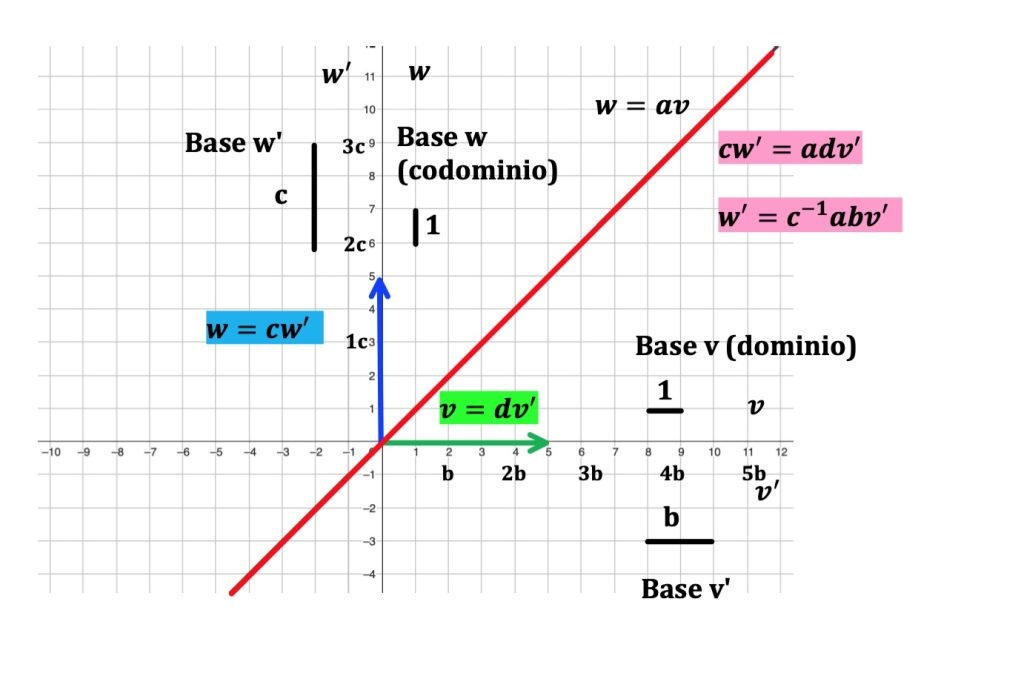
3 – GENERALIZZIAMO IL CAMBIO DI BASE PER LA RETTA
A questo punto proviamo a generalizzare il ragionamento del cambio della retta.
Consideriamo una retta già dotata di un certo coefficiente angolare a:
$$ w= av $$
Sull’asse v (dominio) fissiamo un nuovo sistema tale che:
$$ v= d v’ $$
Dove usiamo la lettera d per indicare la nuova base del dominio al posto del 2 del punto prima.
Mentre sull’asse w (codominio) fissiamo il nuovo sistema tale per cui:
$$ w= cw’ $$
Dove usiamo la lettera c per indicare la nuova base del codominio al posto del 3 del punto prima.
Riscriviamo l’equazione della retta con le due relazioni:
$$ w= av \overset{\begin{cases} v=dv’ \\ w=cw’ \end{cases} }{\longrightarrow} cw’ = adv’ $$
che possiamo riscrivere come:
$$ w’ = c^{-1} adv’ $$
Proviamo a darne una rappresentazione del caso dove a=1 (bisettrice)
4 – CAMBIO DI BASE PER LE APPLICAZIONI LINEARI
A questo punto non ci resta che applicare alle funzioni lineari tutto quello che abbiamo imparato per il caso della retta
Consideriamo una funzione lineare che va da uno spazio V ad uno spazio W
$$ f:\ V \to W \quad f(v) = Av $$
Riscriviamola molto similmente alla retta:
$$ w=Av \quad \text{con }\ v \in V, w \in W $$
A è la matrice della funzione associata alle basi canoniche Iv e Iw
Supponendo che V coincida con Rn e W coincida con Rm, troveremo nelle basi rispettivamente n e m versori fondamentali
$$ \begin{array}{l} V= R^n &\to& I_V= \{ e_1, e_2, \dots , e_n \} \quad \text{base canonica di $V$} \\ W= R^m &\to& I_W= \{ e_1, e_2, \dots , e_m \} \quad \text{base canonica di $W$} \end{array} $$
Possiamo idealmente associare l’idea di base alle unità sul sistema bidimensionale.
Scegliamo ora due nuove basi per V (dominio) e W (codominio).
Chiamiamo queste due basi B’ per il dominio V che sarà composta da n vettori linearmente indipendenti e C’ per il codominio W composta da m vettori linearmente indipendenti
$$ \begin{array}{l} D’= \{ v_1, v_2, \dots , v_n \} \quad \text{nuova base di $V$} \\ C’= \{ w_1, w_2, \dots , w_m \} \quad \text{nuova base di $W$} \end{array} $$
Ricordiamo che i vettori v e w degli spazi vettoriali V e W possono essere riscritte rispetto a queste basi nel seguente modo:
$$ v= D’v’ \quad w=C’w’ $$
Dove v’ e w’ sono i vettori scritti con le coordinate rispetto alle nuove basi di V e W
D’ è la matrice dove i vettori della nuova base del dominio V sono scritti in colonna
C’ è la matrice dove i vettori della nuova base del codominio W sono scritti in colonna.
Dunque riscriviamo l’equazione dell’applicazione lineare:
$$ w= Av \overset{\begin{cases} v= D’v’ \\ w=C’w’ \end{cases} }{\longrightarrow} C’w’ = AD’v’ $$
Da cui ricaviamo la nuova applicazione lineare:
$$ w’ = (C’^{-1} A D’) v’ = A’ v’ \\ \ \\ A’ = C’^{-1} A D’ \ \text{ è la matrice della funzione associata alle nuove basi}$$
Per ottenere la nuova matrice A’ associata alla base D (dominio V) e C (codominio W) moltiplichiamo la matrice A associata alle basi canoniche:
- a sinistra per l’inversa di C ovvero C–1
- a destra per la matrice B’
In maniera sintetica scriviamo:
$$ w’= A’v’ $$
Nel modello bidimensionale gli assi cartesiani rappresentano gli spazi vettoriali V e W.
Le unità di base sono le basi canoniche IV e IC
Le nuove unità di base sono le nuove basi D’ e C’

- a sinistra per la matrice C’ del codominio
- a destra per l’ matrice B’
ESEMPIO DI CAMBIO BASE NELLE APPLICAZIONI LINEARI
Consideriamo ancora la funzione che va da R2 a R2:
$$ f:\ R^2 \to R^2 \quad f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} x+3y \\ x-2y \end{pmatrix} $$
La sua scrittura matriciale dell’applicazione rispetto alle basi canoniche
$$ I_V = I_W = \begin{pmatrix} 1&0 \\ 0&1 \end{pmatrix} $$
è la seguente:
$$ f \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} $$
Dove la matrice A
$$ A = \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} $$
indica la matrice associata alla funzione rispetto alle basi canoniche del dominio V e W
Vogliamo ora riscrivere questa funzione rispetto alle nuove basi D’ del dominio V e C’ del codominio W
$$ D’ = \begin{pmatrix} 2&0 \\ 1&3 \end{pmatrix} \quad C’ = \begin{pmatrix} -1&1 \\ 1&2 \end{pmatrix} $$
(i vettori della base sono le colonne)
Applichiamo dunque la formula generale per il cambio di base:
$$ A’ = C’^{-1} A D’ = \begin{pmatrix} -1&1 \\ 1&2 \end{pmatrix}^{-1} \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} \begin{pmatrix} 2&0 \\ 1&3 \end{pmatrix}= \begin{pmatrix} -2&-4 \\ 1&-1 \end{pmatrix} $$
Ovviamente se ci veniva inizialmente data la matrice A’ e dovevamo trovare la matrice rispetto alla base canonica facevamo il procedimento inverso:
$$ A = C’ A’ D’^{-1} = \begin{pmatrix} -1&1 \\ 1&2 \end{pmatrix} \begin{pmatrix} -2&-4 \\ 1&-1\end{pmatrix} \begin{pmatrix} 2&0 \\ 1&3 \end{pmatrix} ^{-1}= \begin{pmatrix} 1&3 \\ 1&-2 \end{pmatrix} $$
Sempre a partire da A’ possiamo trovare una matrice A” rispetto alle basi D” e C”
$$ D” = \begin{pmatrix} 1&2 \\ 3&4 \end{pmatrix} \quad C” = \begin{pmatrix} 0&1 \\ 1&1 \end{pmatrix} $$
usando la super formula:
$$ \begin{array}{l} A” = C”^{-1} (C’ A’ D’^{-1}) D” = C”^{-1} A D” \\ A”= \begin{pmatrix} 1&2 \\ 3&4 \end{pmatrix} \begin{pmatrix} 0&1 \\ 1&1 \end{pmatrix} \begin{pmatrix} -1&1 \\ 1&2 \end{pmatrix} \begin{pmatrix} -2&-4 \\ 1&-1 \end{pmatrix} \begin{pmatrix} 2&0 \\ 1&3 \end{pmatrix} = \begin{pmatrix} -9&-12 \\ 4&6 \end{pmatrix} \end{array}$$
NUCLEO E IMMAGINE DI UNA APPLICAZIONE LINEARE
Ci sono due concetti che rivestono un’importanza strategica all’interno delle applicazioni lineari: il nucleo e l’immagine.
Il nucleo si trova nel dominio V mentre l’immagine si trova nel codominio W
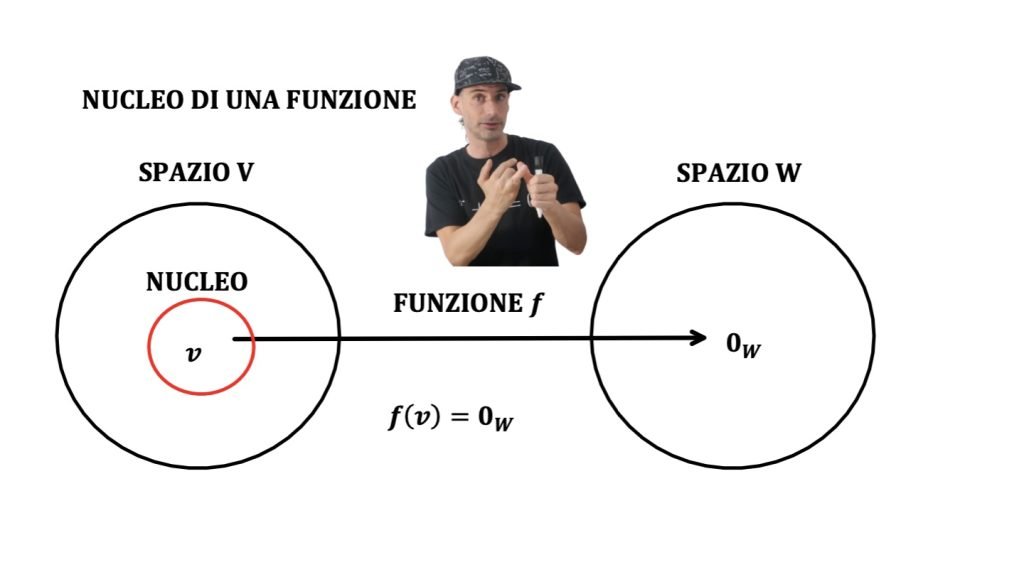
NUCLEO DELLA FUNZIONE LINEARE
Consideriamo una applicazione lineare che va da uno spazio V (dominio) ad uno spazio vettoriale W (codominio) espressa in una forma matriciale
$$ f:\ V \to W \\ f(v)= w= Av $$
Il nucleo detto anche Kernel (Ker per gli amici) della funzione sono i vettori del dominio che si trasformano nello zero di W:
$$ \text{Ker}(f) = \{ v| f(v) = 0_W \} $$
Il nucleo contiene certamente il vettore nullo di V, infatti in qualsiasi applicazione lineare:
$$ f(0_V) = 0_W $$
Se il nucleo è composto unicamente dal vettore nullo allora diciamo che la dimensione del nucleo è zero la funzione è iniettiva.
$$ \text{Ker}(f) = 0_V \to \text{Dim}(\text{Ker}(f)) = 0 \to \text{$f$ è iniettiva} $$
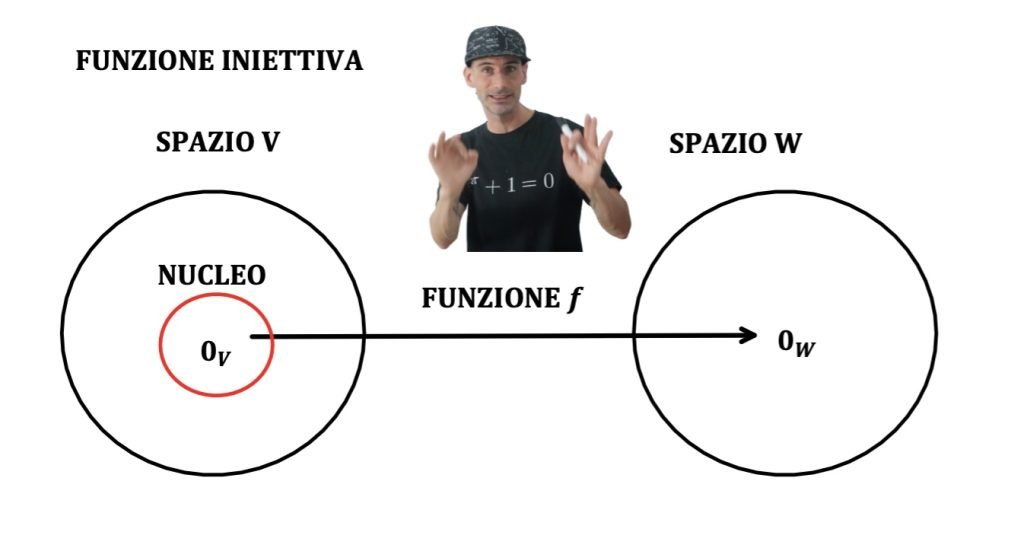
IMMAGINE DELLE FUNZIONI LINEARI
Consideriamo una applicazione lineare che va da uno spazio V (dominio) ad uno spazio vettoriale W (codominio) espressa in una forma matriciale
$$ f:\ V \to W \\ f(v)= w= Av $$
L’immagine della applicazione lineare sono tutti i vettori di w di W che sono calcolati come funzione dei vettori di v dello spazio vettoriale V
$$ \text{Im}(f) = \{w \in W | w= f(v) \} $$
Per trovare la dimensione dell’immagine basta calcolare il rango della matrice A associata alla funzione lineare
$$ f(v) Av: \quad \text{Dim} \left( \text{Im} (f) \right) = \rho (A) $$
Dove 𝜌(A) è il rango della matrice A.
Supponiamo che la funzione f trasformi vettori di n componenti V in vettori con m componenti di W.
Se queste componenti sono numeri reali parliamo di funzione che va da V=Rn a W=Rm
In questo caso la matrice A della funzione è una m⨯n
$$f:\ V = R^n \to W = R^m \quad \to \quad A \in M [m \times n] $$
Diremo che la funzione è suriettiva quando la dimensione dell’immagine è uguale alla dimensione dello spazio vettoriale W di arrivo
$$ \text{Dim} \left( \text{Im} \right) = \rho (A) = \text{Dim}(W) = m \to \text{$f$ è suriettiva} $$
In questo caso una base dell’immagine sono le m colonne della matrice A contenute nel minore di ordine massimo
Quando invece il rango della funzione è minore di m (dimensione di W) allora la funzione non è suriettiva e una base dell’immagine sono le colonne di A contenute nel rango.
HAI QUALCHE DOMANDA ?
Se questo articolo ti ha fatto venire qualche domanda scrivila nei commenti.
SCOPRI I SEGRETI DELL’ALGEBRA LINEARE
Impara l’algebra lineare con un percorso strutturato e facile da seguire passo a passo.
Un viaggio che parte dai vettori e dalle matrici, passando per i sitemi lineari giungerai nei meandri degli spazi vettoriali, della diagonalizzazione delle matrici con tappa finale nelle coniche.
L’ARTICOLO TI è PIACIUTO ?
Se questo contenuto ti è piaciuto e vorresti che anche altri utenti possano goderne di questo ed altri ancora sostieni il progetto offrendomi un semplice caffè virtuale
Questo semplice gesto per me significa moltissimo e può essere un forte impulso per lo sviluppo di tutto il progetto di divulgazione matematica
Visita il canale YouTube!